 ElectronicABC
ElectronicABCGERBER:
https://mega.nz/file/eRwA1Q5D#6HnrcAPaUwlRHEnMkTAI0cX6lRa_7LEuygl4qB_5niA
SCHEMATIC DIAGRAM
HERE WE WILL SEE THE SCHEMATIC DIAGRAM AND ALL THE VALUES OF THE ELECTRONIC COMPONENTS USED FOR OUR TIMER PROJECT.


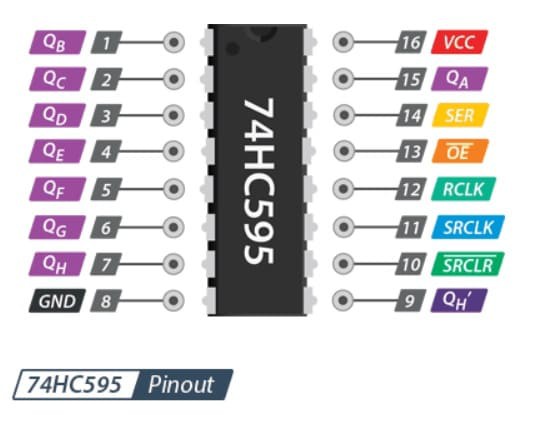
74HC595
INFO
The 74HC595 register allows converting data from serial to parallel format. It is an ideal chip to expand the digital outputs of our Arduino/Pic, 3 Arduino pins can easily handle more than 500 outputs. The 74HC595 is used in the construction of LED Matrix/Cubes, Relay management and more.
The 74HC595 internally has a shift register, a latch register, and tri-state outputs. The shift and storage registers have separate clocks. It has one serial input, eight parallel type outputs (8 bit) and one serial output (Q7S) to use registers in cascade and thus further expand the number of parallel outputs.
TECHNICAL SPECIFICATIONS
Chip: 74HC595
CMOS technology
Compatible with TTL voltages
Operating Voltage: 3.3V - 5V
16 pin DIP type packaging
Offset Frequency (max): 100 MHz
BOOTLOADER ATTINY85
Ok, we have to burn a bootloader to the chi adn then uplaod the code. For both those steps we need the connections below to an Arduino. In my case I will use Arduino UNO. So, make the connections as below between the Arduino SPI port and the PCB. We will sue the Arduino as ISP to uplaod codes.

Install ATtiny Boards
Run your Arduino IDE. We need to install the ATtiny85 boards in case that you don't already have that. To install the boards, copy the link below. Go to Ardduino IDE, to File -> Preferences -> Paste the link in the "Additional Boards Manager URLs". If you already have another link ther, add a comm "," first and then paste the new link. Save and close preferences. Now go to Tools -> Board -> Boards Manager. In this manager search for ATtiny adn install the attiny boards. Now, if you go on tool -> board, you should see the ATtiny boards as well.

Arduino As ISP
In order to use the Arduino as an ISP programmer, we need to uplaod a code to it so for taht, go to Examples -> ArduinoISP -> ArduinoISP and open that example code. Then make sure yous elect the type of board for your Arduino, in my case, Arduino UNO. Select the com and leave the default programmer as "AVRISP mkII". Connect the USB, select the COM and uplaod the code to the Arduino UNO.

Bootloader Burn
Ok, now the Arduino has the ISP code so it will act as a ISP programmer. Now, let's butn the bootloader. Go to Tools -> Board and selectt the ATtiny25/45/85 type of board. Then, once that is selected, go to Tools -> Processor -> And select the ATtiny85. Then go to Clock -> and select the internal 8MHz one so we will burn that bootlaoder. Go to Tools -> Programmer and make sure you now change the normal programmer from "AVRISP mkII" to "Arduino as ISP". Finally, amke sure the Arduino UNO is connected to the PCB to the ISP port and go to Tools -> Burn Bootloader. The Arduino Rx/Tx LEDs will blink and after a while you will get the bootloader burn complete on the screen.


CODE ARDUINO



int clockpin = 2; //Cuando ay que leer los bit SH
int data = 1; //Envio datos DS
int latch = 0; //indica pin de salida en el chip ST
// no cambiar el const int
const int left_sen = 4 ; // pin 2 como entrada para el sensor izquierdo
const int right_sen = 3; // pin 3 como entrada para el sensor derecho
//VARIABLES PARA EL CONTADOR ASCENDIENTE
// estas variables si puede ser cambiado
int contador = 0;
int contadorU = 0;
int contadorD = 0;
int contadorC = 0;
int contadorM = 0;
int estado_left_sen = 0; // estado del pulsado actual
int lastButtonState_left = 1; // estado del pulsado anterior
boolean start = false;
boolean start1 = false;
boolean ena_D = false;
boolean ena_C = false;
boolean ok = false;
unsigned long time;
float tiempo = 1000;
unsigned long t = 0;
//VARIABLES PARA EL CONTADOR DESCENDIENTE
// estas variables si puede ser cambiado
int estado_right_sen = 0; // estado del pulsado actual
int lastButtonState_right = 1; // estado del pulsado anterior
//Aqui esta el array que contiene todos los UNDs para nuestro display
//El display tiene las conexiones alcontrario ell pin 8 del 74hc595 es el primer dijito binario
const int NUM[] = { // segmentos
191, //Numero 0 en binario es : 10111111
134, //Numero 1 en binario es : 10000110
219, //Numero 2 en binario es : 11011011
207, //Numero 3 en binario es : 11001111
230, //Numero 4 en binario es : 11100110
237, //Numero 5 en binario es : 11101101
253, //Numero 6 en binario es : 11111101
135, //Numero 7 en binario es : 10000111
255, //Numero 8 en binario es : 11111111
239, //Numero 9 en binario es : 11101111
191, //Numero 0 en binario es : 10111111
14, //Numero 7 en binario es : 00001110
13, //Numero 8 en binario es : 00001101
11, //Numero 9 en binario es : 00001011
7, //Numero 0 en binario es : 00000111
46, //Numero 7 en binario es : 00101110
45, //Numero 8 en binario es : 00101101
43, //Numero 9 en binario es : 00101011
39, //Numero 0 en binario es : 00100111
};
void setup() {
pinMode(left_sen, INPUT);
pinMode(right_sen, INPUT);
pinMode(latch, OUTPUT);
pinMode(clockpin, OUTPUT);
pinMode(data, OUTPUT);
}
void loop()
{
if (start == false) {
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[11]); // lee el arreglo y pasa cada NUM a lectura binaria
shiftOut(data, clockpin, MSBFIRST, NUM[0]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[12]); // lee el arreglo y pasa cada NUM a lectura binaria
shiftOut(data, clockpin, MSBFIRST, NUM[0]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[13]); // lee el arreglo y pasa cada NUM a lectura binaria
shiftOut(data, clockpin, MSBFIRST, NUM[0]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[14]); // lee el arreglo y pasa cada NUM a lectura binaria
shiftOut(data, clockpin, MSBFIRST, NUM[0]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
}
estado_left_sen = digitalRead(left_sen);
estado_right_sen = digitalRead(right_sen);
if (estado_left_sen != lastButtonState_left) {
if (estado_left_sen == HIGH) {
start = true;
start1 = false;
ok = false;
if (contador <= 5940) {
if (contadorU >= 10) {
contadorU = 0;
}
if (contadorU >= 9) {
contadorD++;
}
if (contadorD >= 6) {
contadorD = 0;
contadorC++;
}
if (contadorC >= 10) {
contadorC = 0;
contadorM++;
}
if (contadorM >= 6) {
contadorM = 0;
}
contador++;
contadorU++;
}
}
}
lastButtonState_left = estado_left_sen;
if (estado_right_sen != lastButtonState_right ) {
if (estado_right_sen == HIGH) {
start1 = true;
//start = false;
ok = true;
}
}
lastButtonState_right = estado_right_sen;
if (start1 == true) {
time = millis();
if (time - t > tiempo) {
t = time;
if (contador > 0) {
contador--;
contadorU--;
if (contadorU == 0) {
contadorU = 10;
}
if (contadorU == 9) {
if (contadorD > 0) {
contadorD--;
}
}
else if (contadorD == 0 && contadorU == 10) {
ena_D = true;
}
if ((ena_D == true) && (contadorU == 9)) {
if (contadorC > 0) {
contadorD = 5;
ena_D = false;
contadorC--;
}
}
if (contadorC == 0 && contadorD == 0 && contadorU == 10) {
ena_C = true;
}
if (ena_C == true && contadorD == 5 && contadorU == 9) {
if (contadorM > 0) {
contadorC = 9 ;
ena_C = false;
contadorM--;
}
}
}
}
cont ();
}
if (contadorU == 10 && contadorD == 0 && contadorC == 0 && contadorM == 0) {
ok = false;
}
if (start == true) {
cont ();
}
}
void cont() {
digitalWrite(latch, LOW);
if (ok == false && contadorU >= 0 && contadorD >= 0 && contadorC >= 0 && contadorM >= 0) {
shiftOut(data, clockpin, MSBFIRST, NUM[11]); // lee el arreglo y pasa cada NUM a lectura binaria
}
else if (ok == true && (contadorU > 0 || contadorD > 0 || contadorC > 0 || contadorM > 0)) {
shiftOut(data, clockpin, MSBFIRST, NUM[15]); // lee el arreglo y pasa cada NUM a lectura binaria
}
shiftOut(data, clockpin, MSBFIRST, NUM[contadorM]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
digitalWrite(latch, LOW);
if (ok == false && contadorU >= 0 && contadorD >= 0 && contadorC >= 0 && contadorM >= 0) {
shiftOut(data, clockpin, MSBFIRST, NUM[12]); // lee el arreglo y pasa cada NUM a lectura binaria
}
else if (ok == true && (contadorU > 0 || contadorD > 0 || contadorC > 0 || contadorM > 0)) {
shiftOut(data, clockpin, MSBFIRST, NUM[16]); // lee el arreglo y pasa cada NUM a lectura binaria
}
shiftOut(data, clockpin, MSBFIRST, NUM[contadorC]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
digitalWrite(latch, LOW);
if (ok == false && contadorU >= 0 && contadorD >= 0 && contadorC >= 0 && contadorM >= 0) {
shiftOut(data, clockpin, MSBFIRST, NUM[13]); // lee el arreglo y pasa cada NUM a lectura binaria
}
else if (ok == true && (contadorU > 0 || contadorD > 0 || contadorC > 0 || contadorM > 0)) {
shiftOut(data, clockpin, MSBFIRST, NUM[17]); // lee el arreglo y pasa cada NUM a lectura binaria
}
shiftOut(data, clockpin, MSBFIRST, NUM[contadorD]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
digitalWrite(latch, LOW);
if (ok == false && contadorU >= 0 && contadorD >= 0 && contadorC >= 0 && contadorM >= 0) {
shiftOut(data, clockpin, MSBFIRST, NUM[14]); // lee el arreglo y pasa cada NUM a lectura binaria
}
else if (ok == true && (contadorU > 0 || contadorD > 0 || contadorC > 0 || contadorM > 0)) {
shiftOut(data, clockpin, MSBFIRST, NUM[18]); // lee el arreglo y pasa cada NUM a lectura binaria
}
shiftOut(data, clockpin, MSBFIRST, NUM[contadorU]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
delayMicroseconds(1);
}
ELECTRONIC COMPONENTS
- 2 DIODOS 1N5819 SMD
- 3 CAP. 100NF 1206
- 2 BT3904 TRANSISTOR NPN SMD
- 3 RESISTOR 1K 1206 SMD
- 4 RESISTOR 10K 1206 SMD
- 8 RESISTOR 220 ohm 1206 SMD
- 1 DIODO 1N4148 SMD
- 1 DIODO LED 1206 RED
- 3 BUTTON 4 PINS
- 4 DISPLAY CATODO COMUN
- 1 BUZZER 5VDC
- 2 CI 74HC595
- 1 RELE 5VDC
- 1 TERMINAL BLUE 2 PIN
- 1 TERMINAL BLUE 3 PIN
- 1 PCB
EASYEDA
Once the project is finished with all the respective tests, we carry out the PCB design and we will obtain the routed tracks and the 3D image of how our finished PCB would look.


JLCPCB
Once the pcb is designed, we will send our friends from JLCPCB to manufacture our PCB.
5pcbs only $2
JLCPCB number 1 PCB manufacturing company worldwide professional pcbs and excellent finish.
GERBER PCB:
https://mega.nz/file/eRwA1Q5D#6HnrcAPaUwlRHEnMkTAI0cX6lRa_7LEuygl4qB_5niA

