 HappyFox
HappyFoxOriginally my BoB was going to be a much shorter and smaller bot. However as I was starting to build it, I was given an Intel Edison by the nice fellows at Metrix Create:Space. Obviously an Edison is massively more powerful than what is needed for a BoB, but the absurdity of using it in such a project tickled my nature. This means that my BoB is now much larger than originally planned.
The original servos were 9 gram micro servos that most BoB's use. However the increase in height and weight means that the servo horns are not strong enough to support his new girth. As seen in the video below:
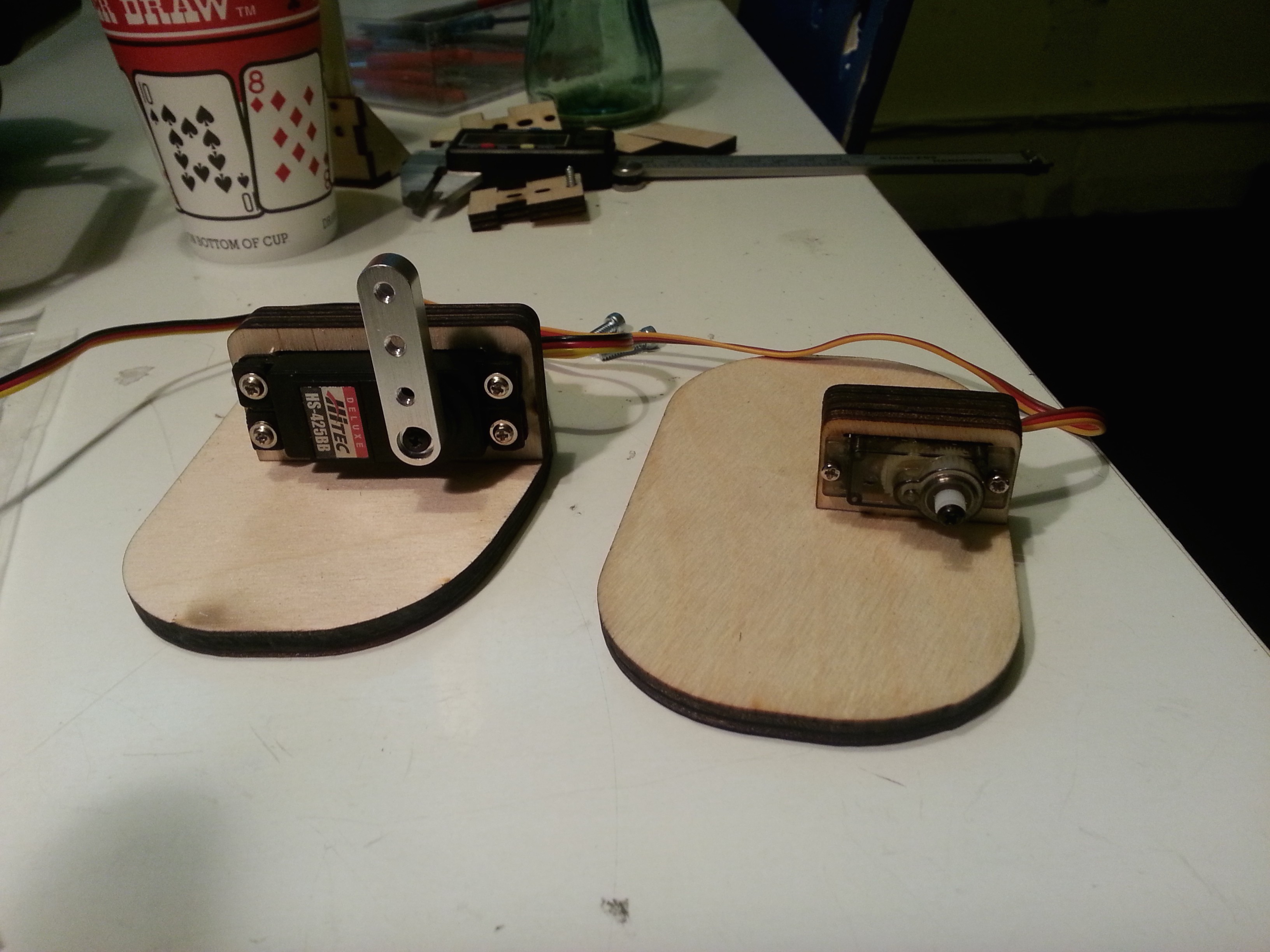
So I decided to upgrade to standard servos, I went with Hitech HS-425BB as they were cheap with dual ball bearings. This should be enough to move the added girth and support the added weight. I also grabbed some heavy duty horns from Servocity.
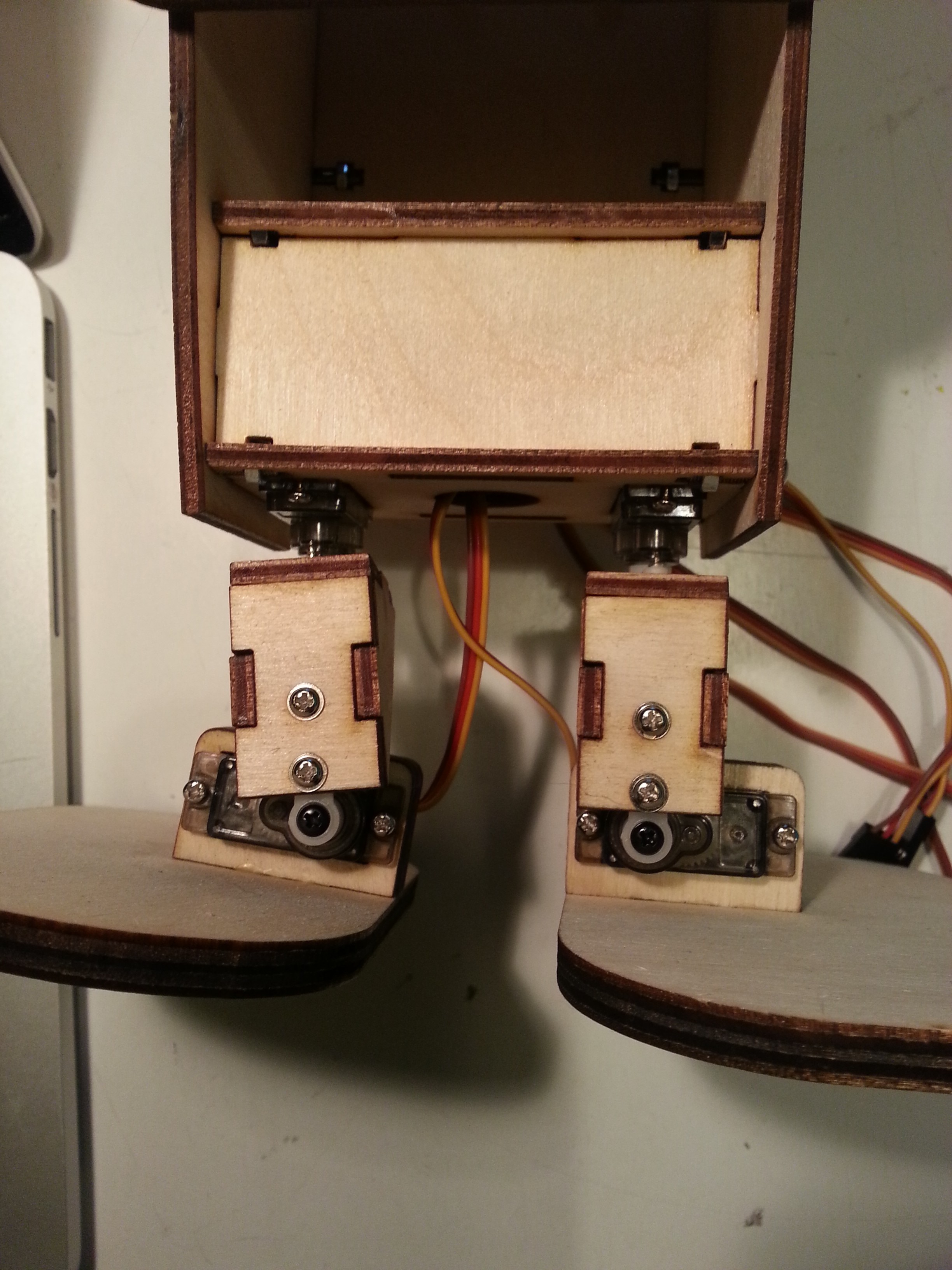
Of course this means that I had to redesign and rebuild the feet and legs.
So the original legs and feet:
And the new feet:
As I was doing this I realized that I would need to upgrade the hips as well. This will mean a redesign of the body. But I would rather do that now than later. So I have ordered 2 more servos and horns. When they arrive I will rebuild the body and legs.
I do have a concern that the legs will get too long, causing the bot to tip more even when lifting his foot slightly. I have made the foot wider to handle this, but we will have to see when it is all together.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.