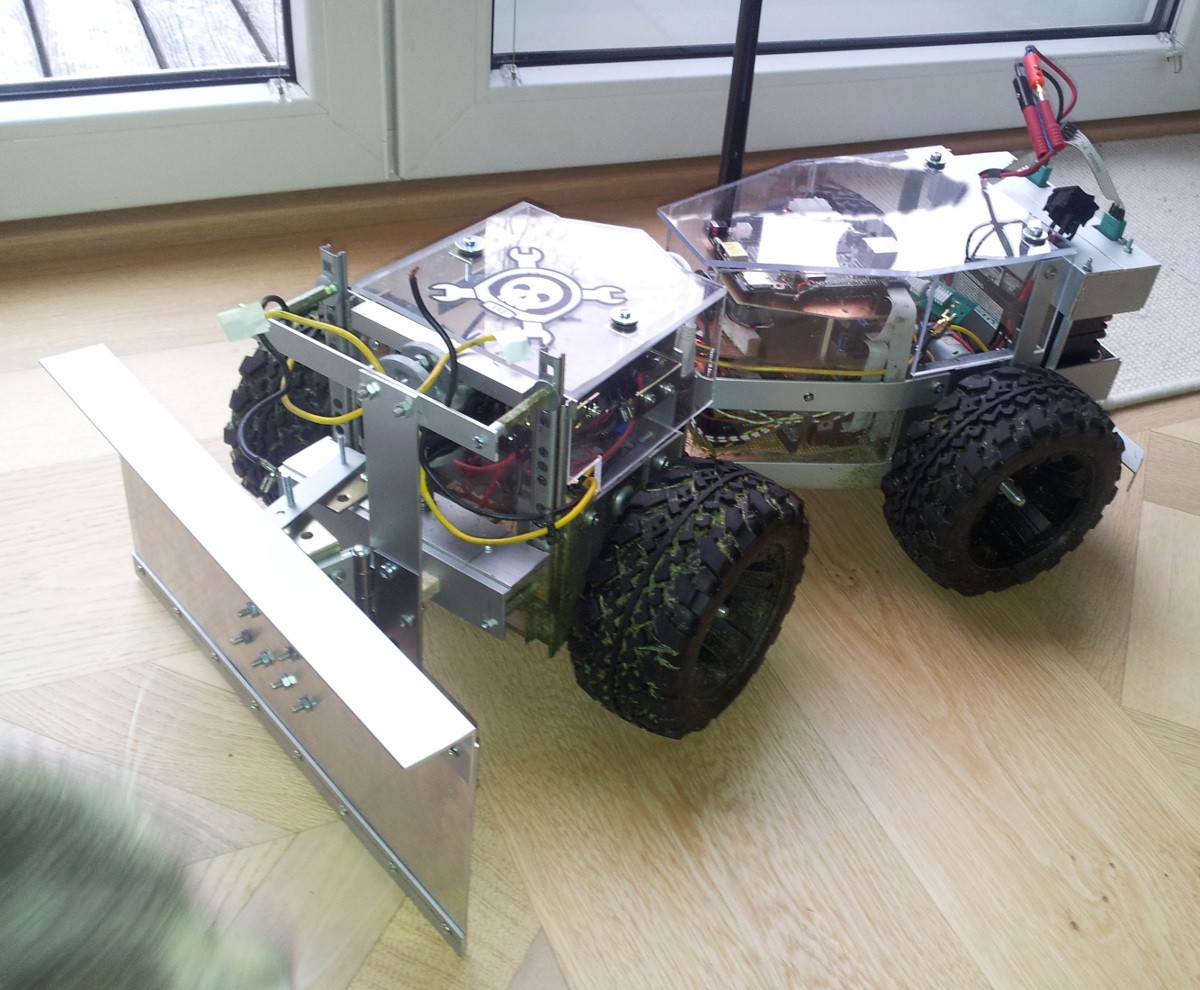
 schuhumi
schuhumi- Four weel drive with kink steering
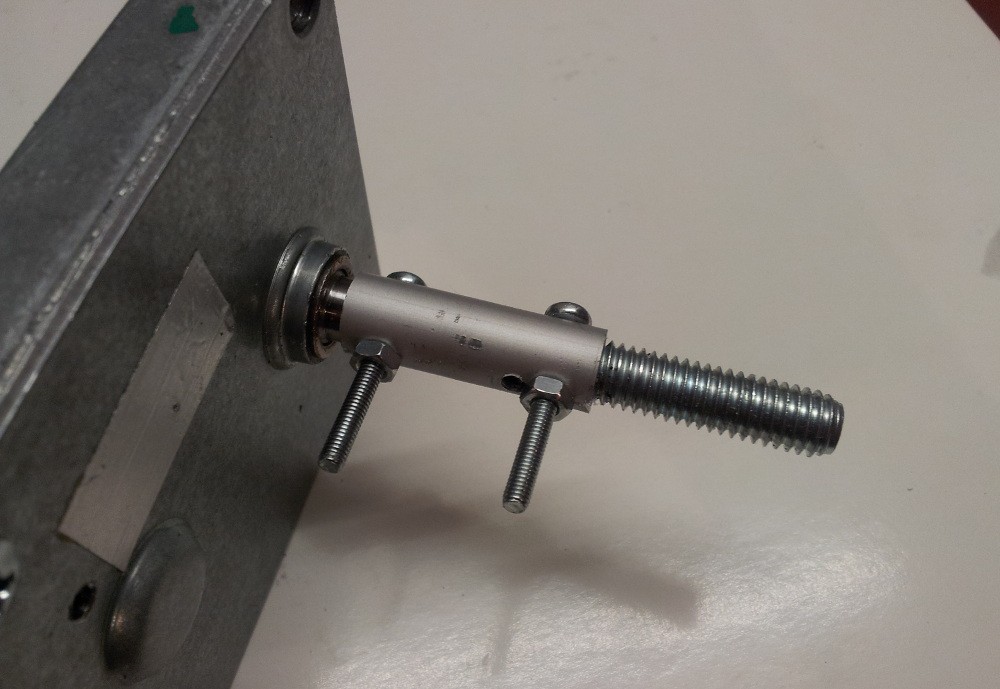
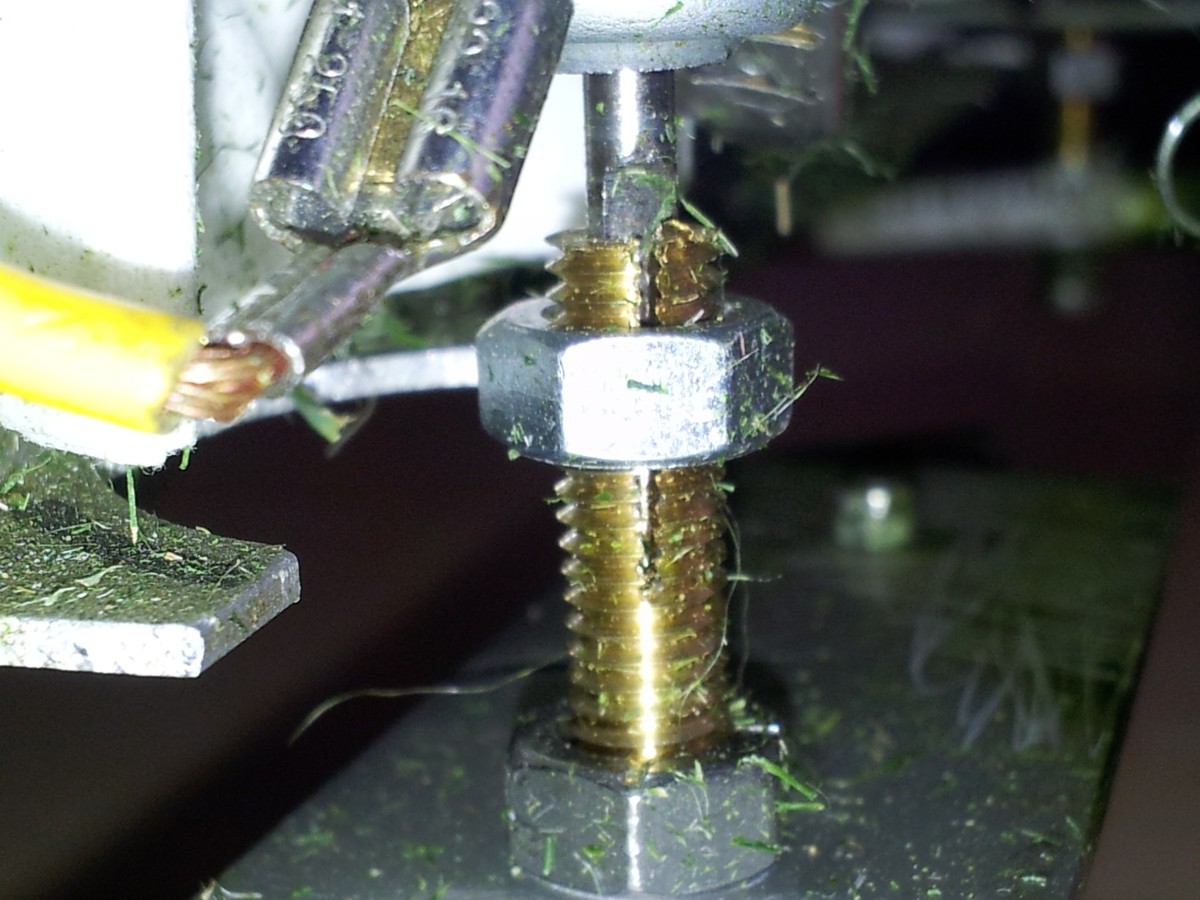
- Electric mowing height leveling
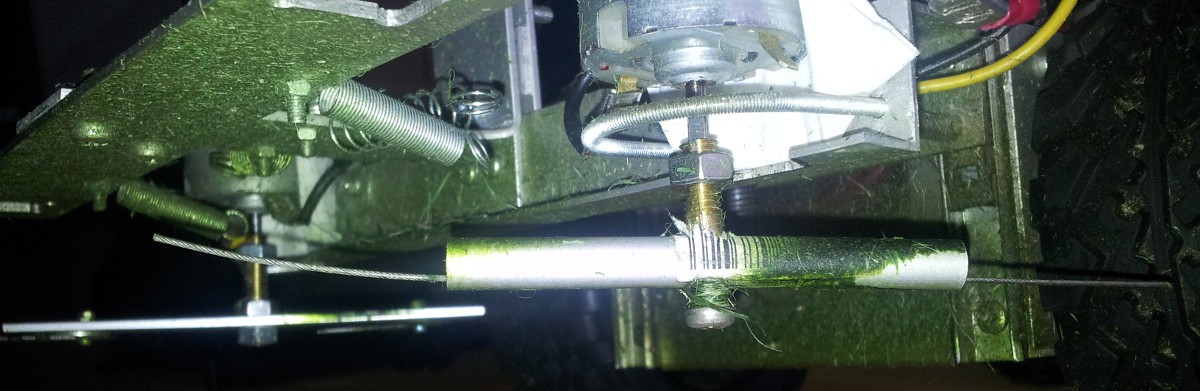
- Two 85 watt mowing motors, each equipped with two very sharp blades, able to snap back on hard obstacles
- On the fly interchangeable LiPo-battery with voltage monitoring, about 1 hour of battery live on active mowing
- Wifi network connection for web interface which includes gamepad/joystick remote control
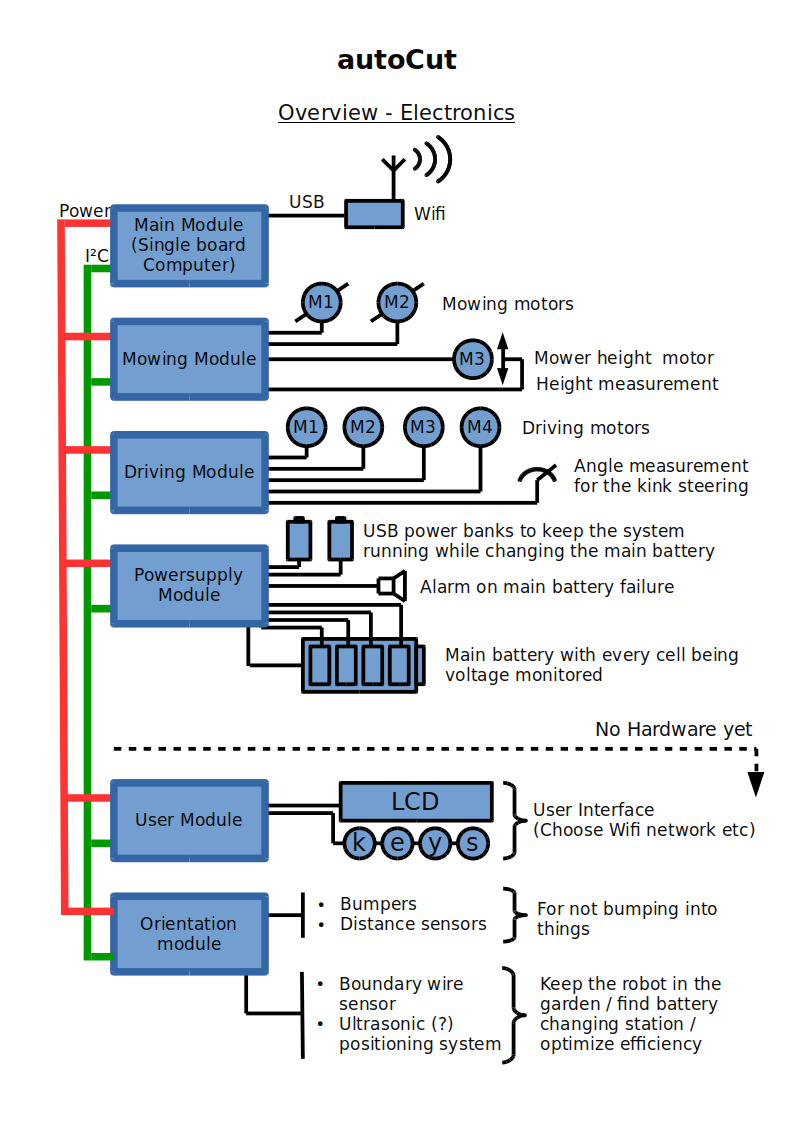
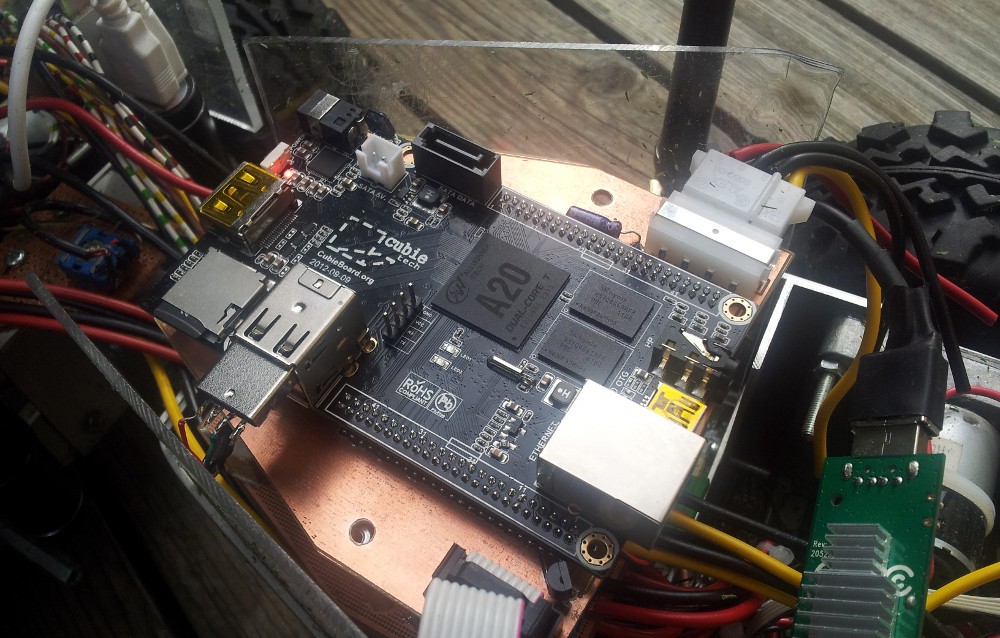
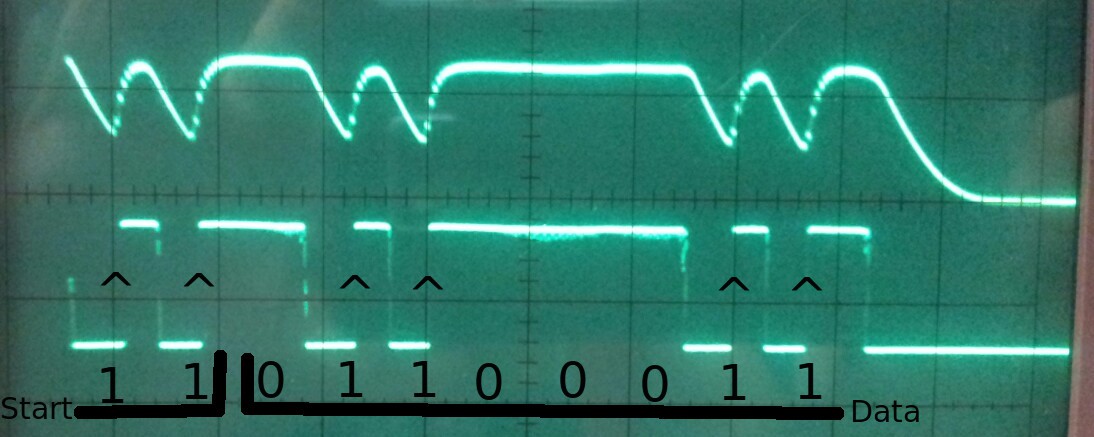
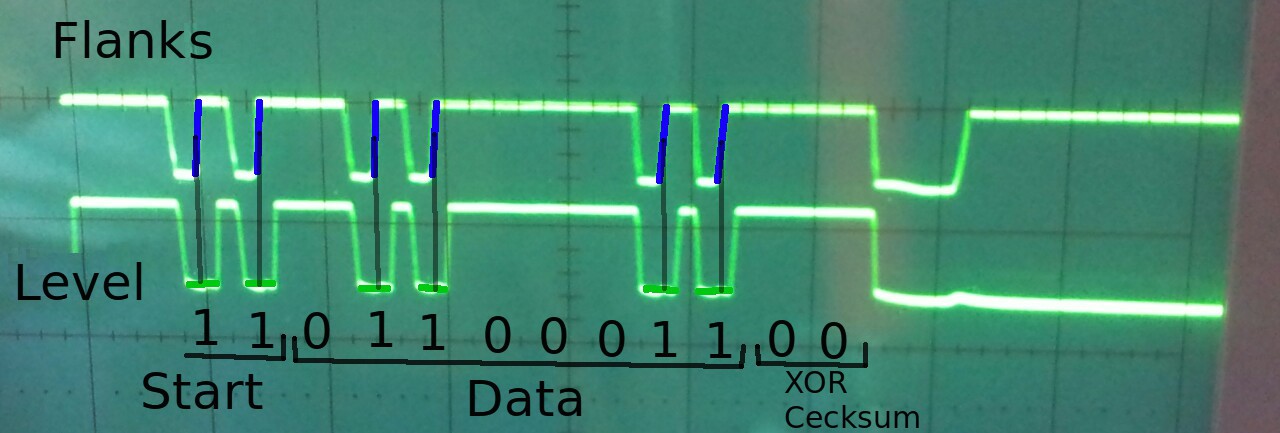
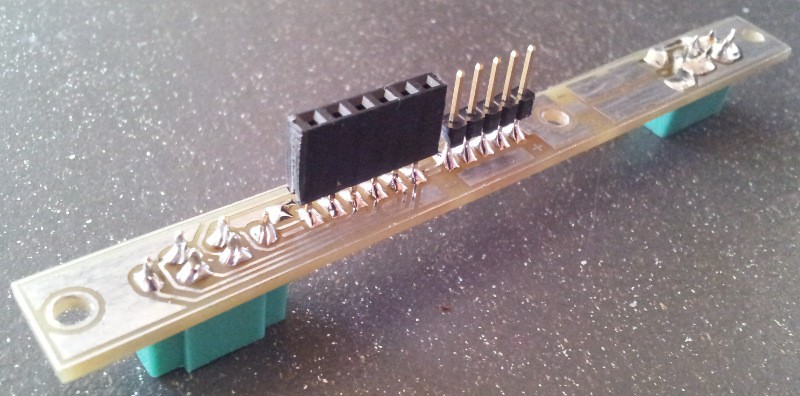
- Modular electronics: a cuple of modules, connected with a power- and I²C-bus with a Raspberry Pi as master
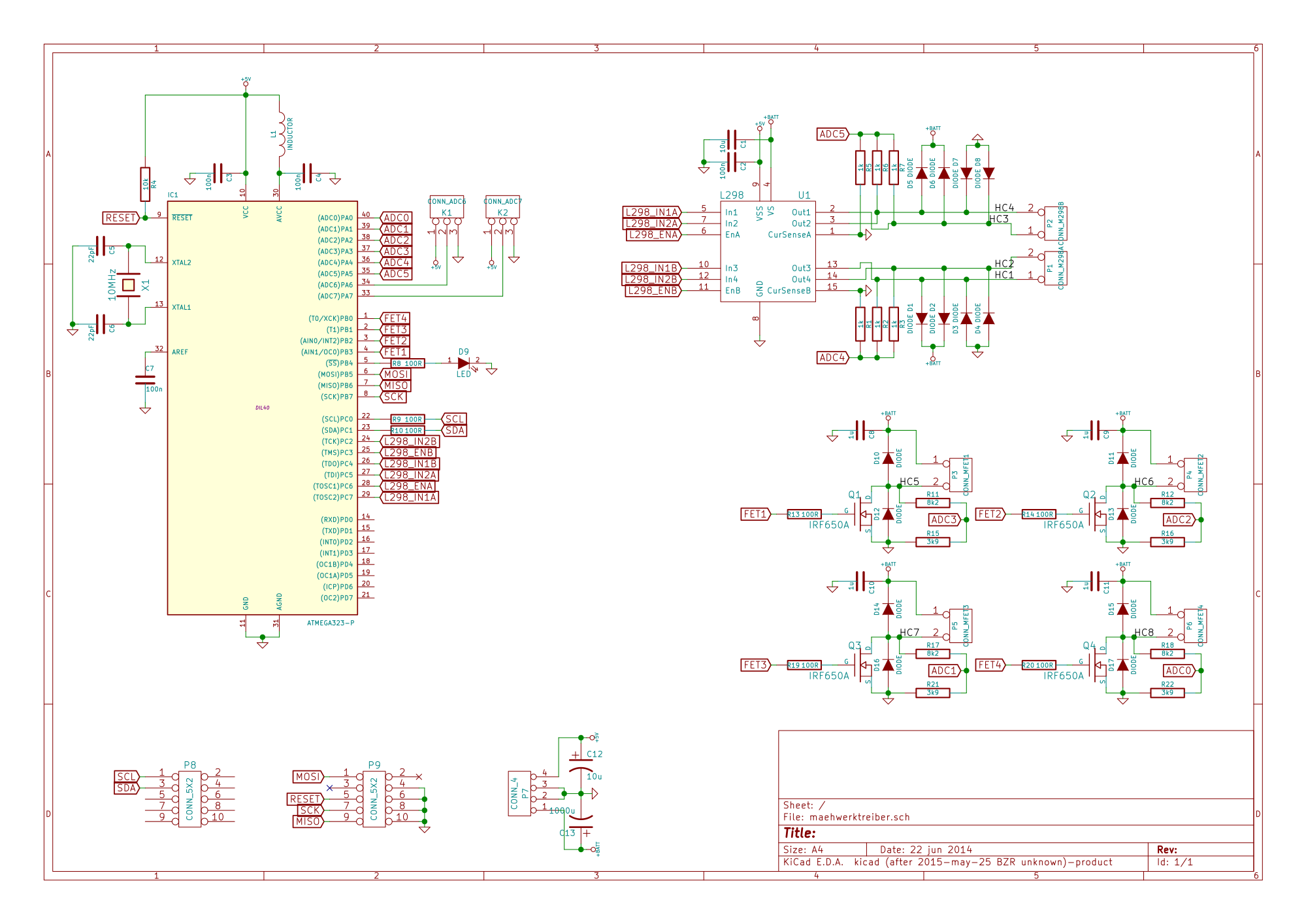
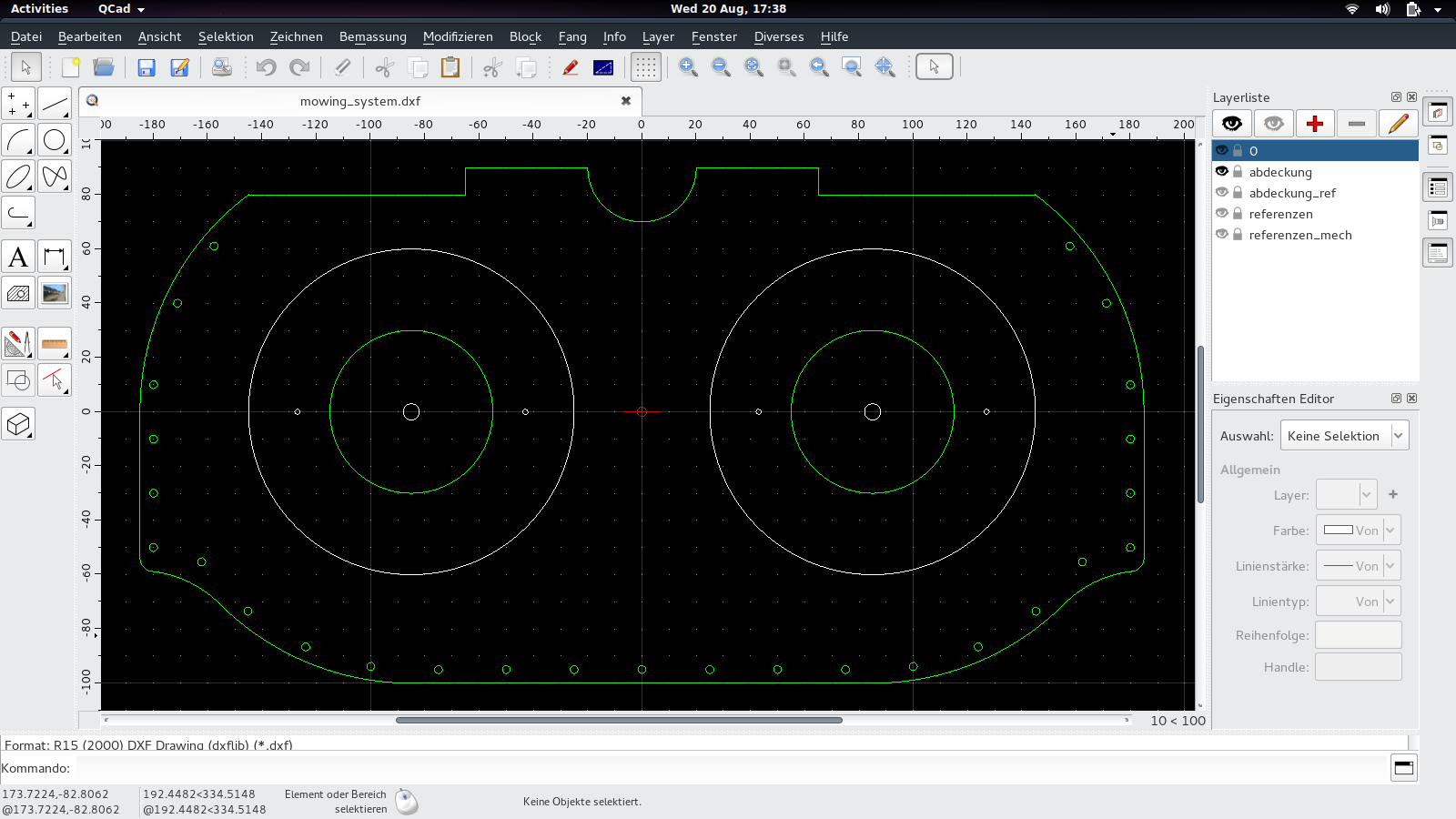
System design of the robot itself:
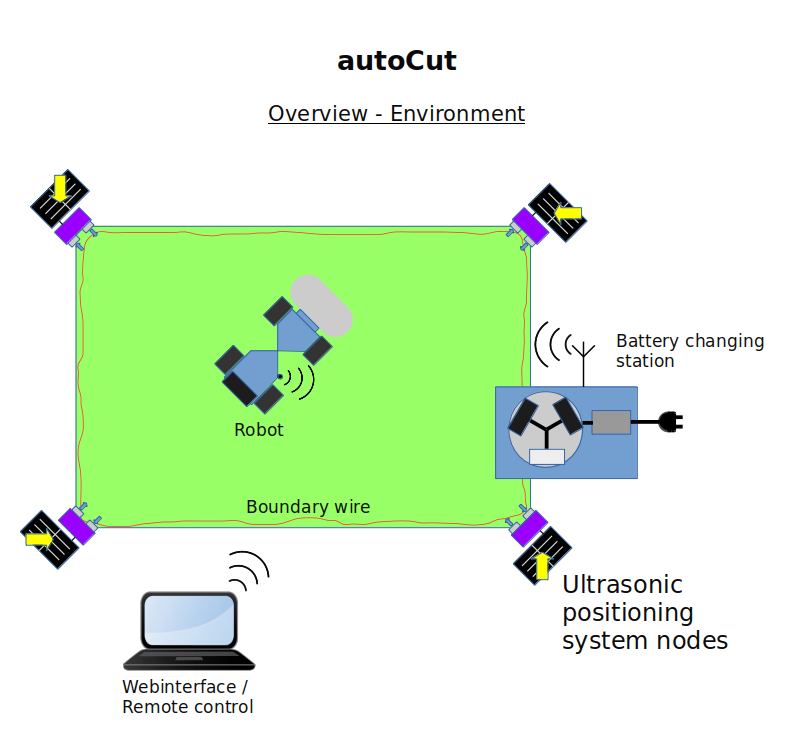
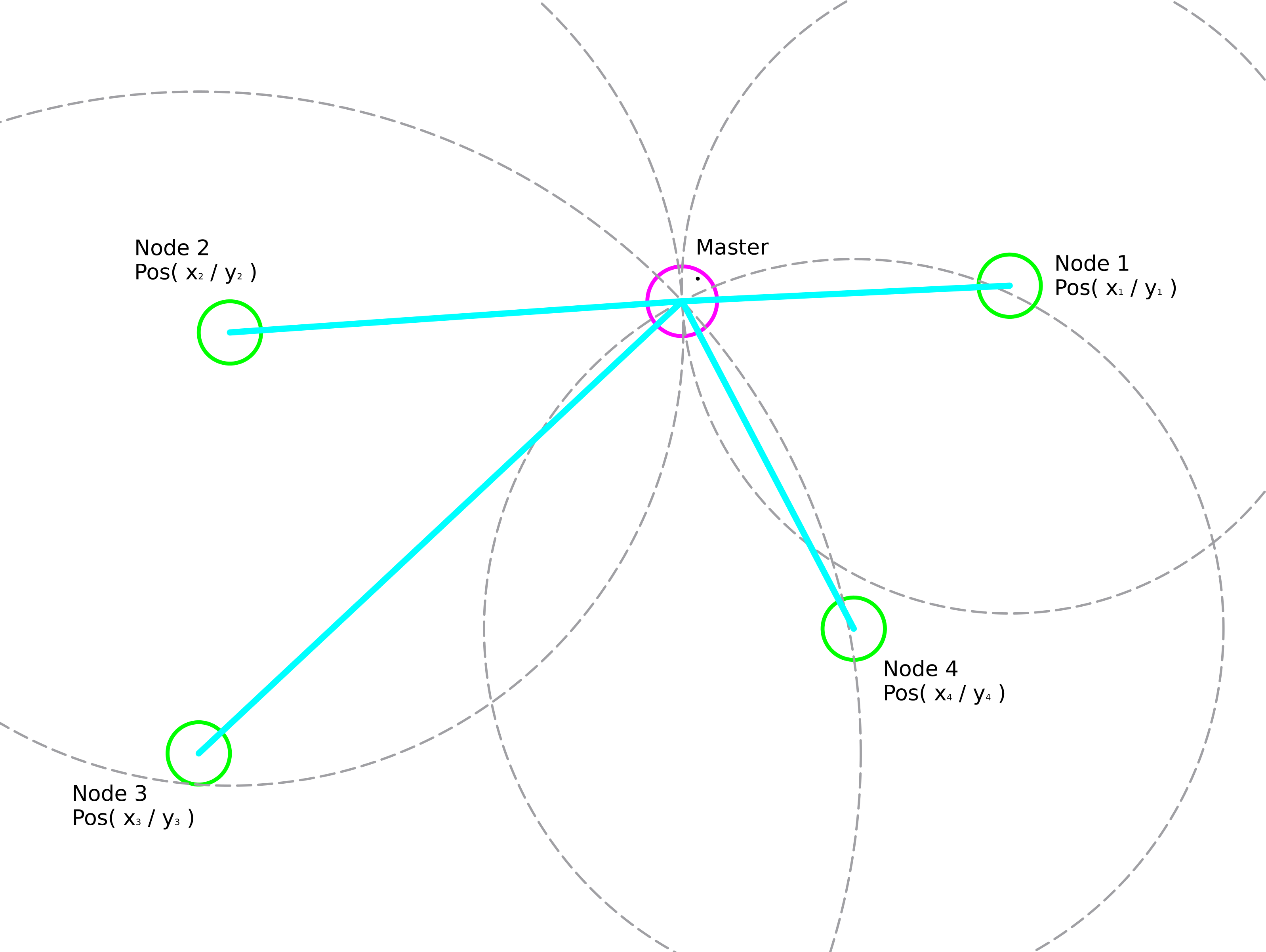
Overview of the whole system:




















 Roger
Roger
 Josh Starnes
Josh Starnes
 Apollo Timbers
Apollo Timbers
 Emmanuel
Emmanuel
Interesting meaning and I agree, that the best high lift lawn mower blades are so useful! And what's more, such things are really important, because without good lawn mower blades, getting a quality lawn tidy becomes a chore, whereas with quality ones it's more of a pleasure and an easy walk.