 Giovanni Durso
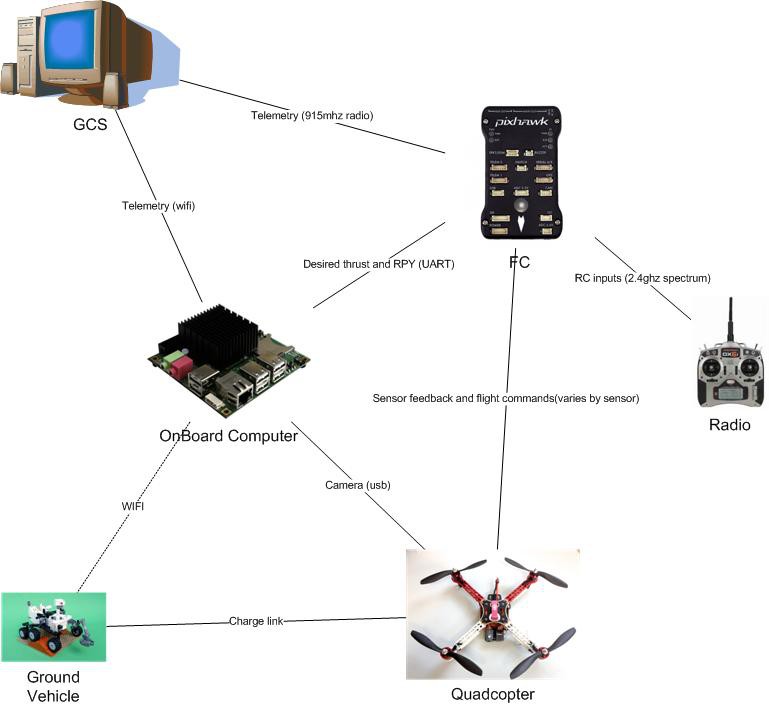
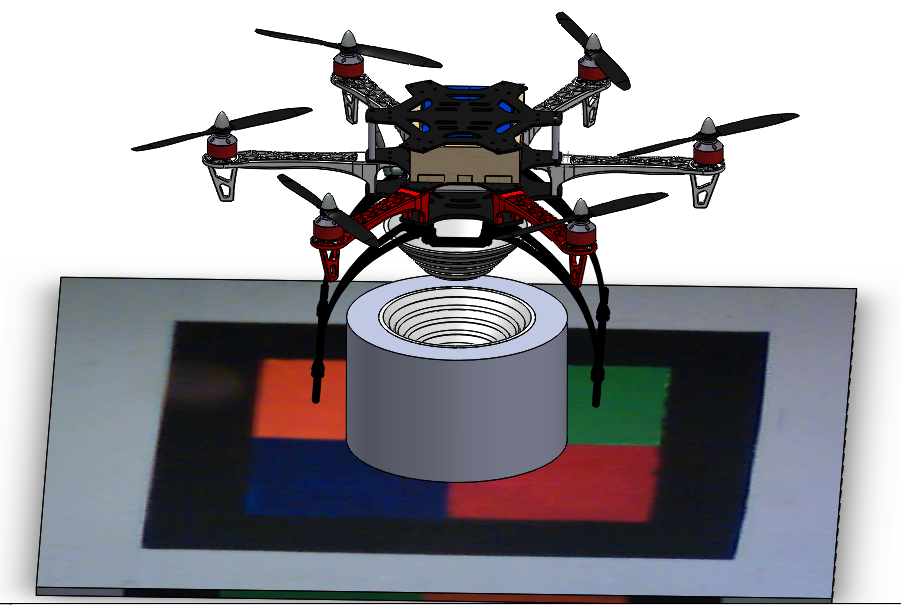
Giovanni DursoThe cheap small GPS used on hobby UAVS are only accurate to +-5m and traditional landing systems simply move the copter to a predefined GPS location and slowly lower the craft hoping that there is nothing in the way and that the position is where you started. This is nowhere near accurate enough to allow the copters to dock and thus recharge themselves. Normally a human operator is required to move the copter from the landing site to a place where it can be recharged. This limits mission operation and requires a human operator to be physically present.
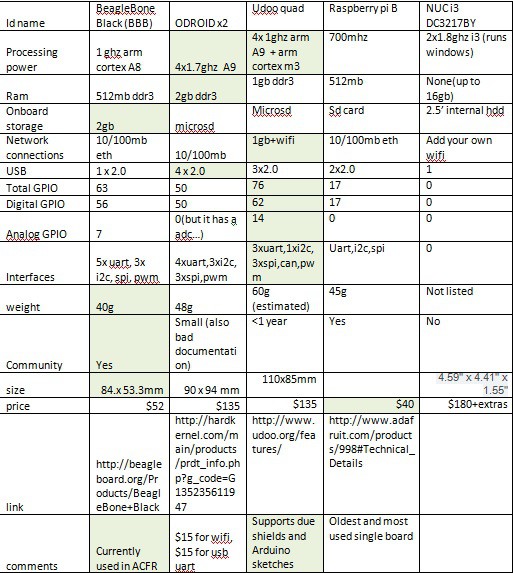
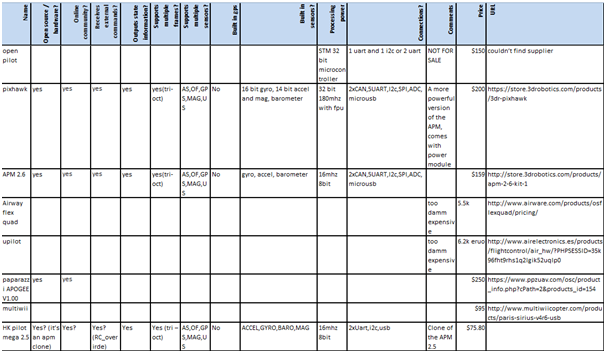
Utilizing recent advances in low power high performance computing and computer vision techniques my system will allow the copter to dock, recharge itself and when finished fly off again and continue its mission thus partially compensating for the poor endurance of multirotors.
Todo
- Design testing platform [DONE]
- Build testing platform [DONE]
- Test flightworthyness of platform [DONE]
- Design recharging electronics [Underway]
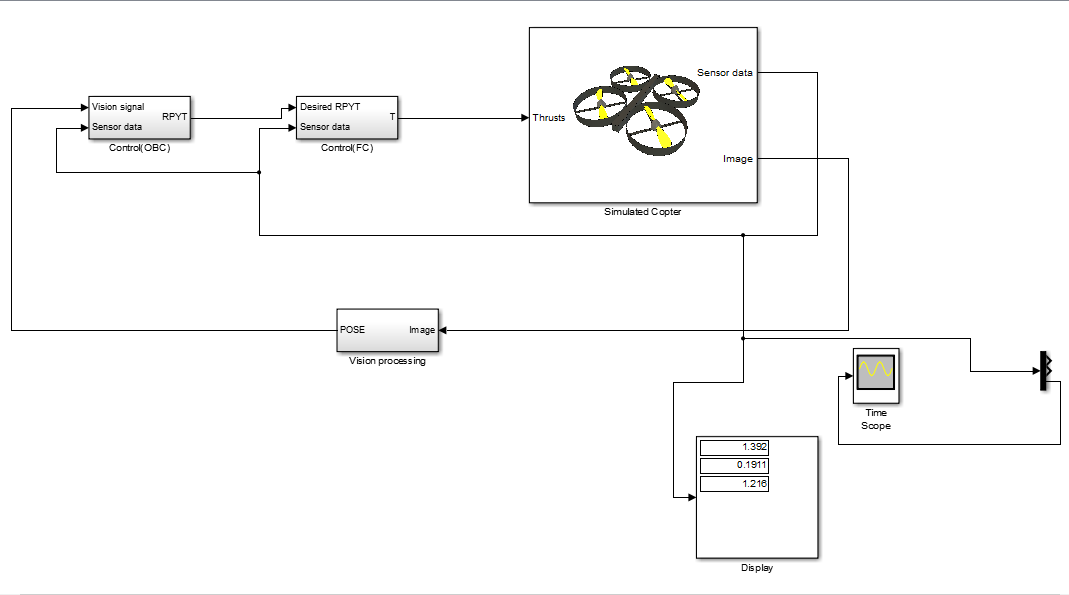
- Design vision software for landing [DONE]
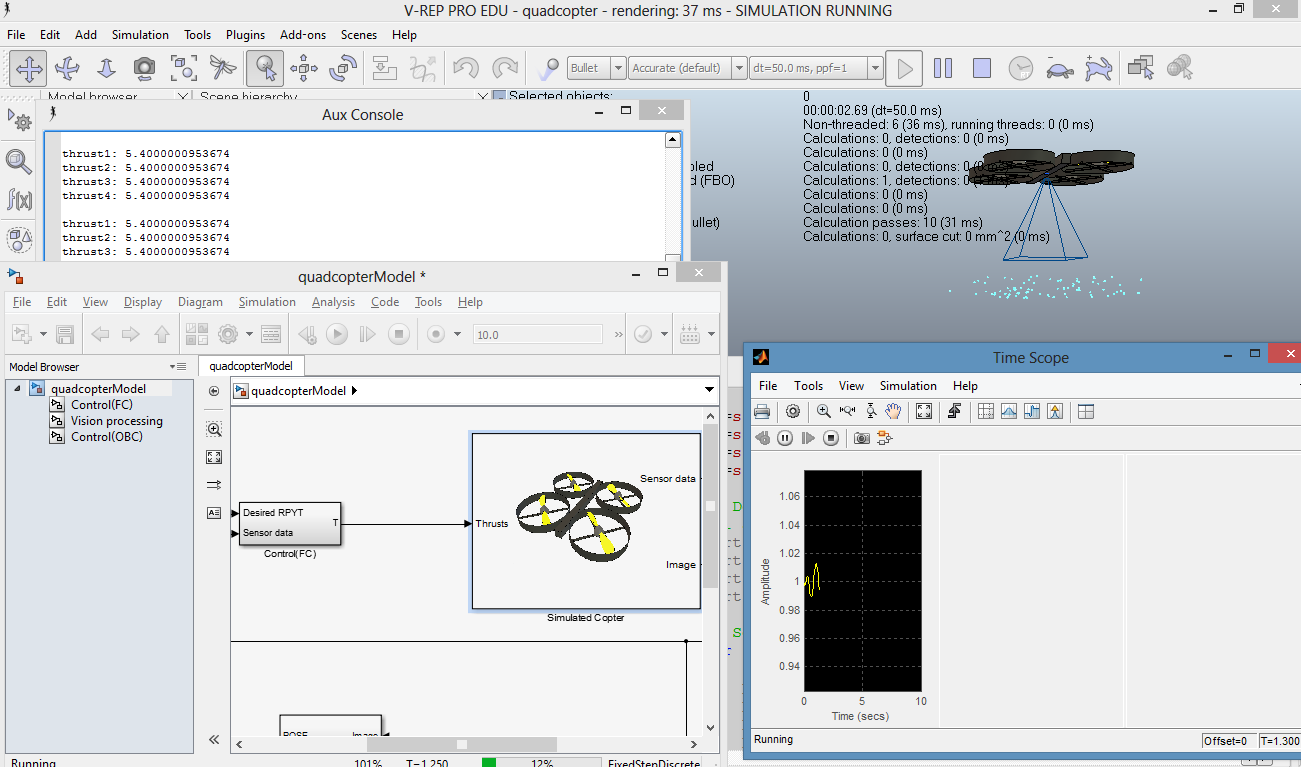
- Test integration of vision system with platform [DONE]
-Test landing capabilities of platform [DONE and works within acceptable parameters]
-Finish prototyping docking hardware [Todo}
-Finish prototyping docking electronics [Todo]






 Jean-François Duval
Jean-François Duval
 Matej Gurnak
Matej Gurnak
 Canine Defense Technologi
Canine Defense Technologi
 New Dexterity
New Dexterity
Not seeing any source code in repository