 NooTriX
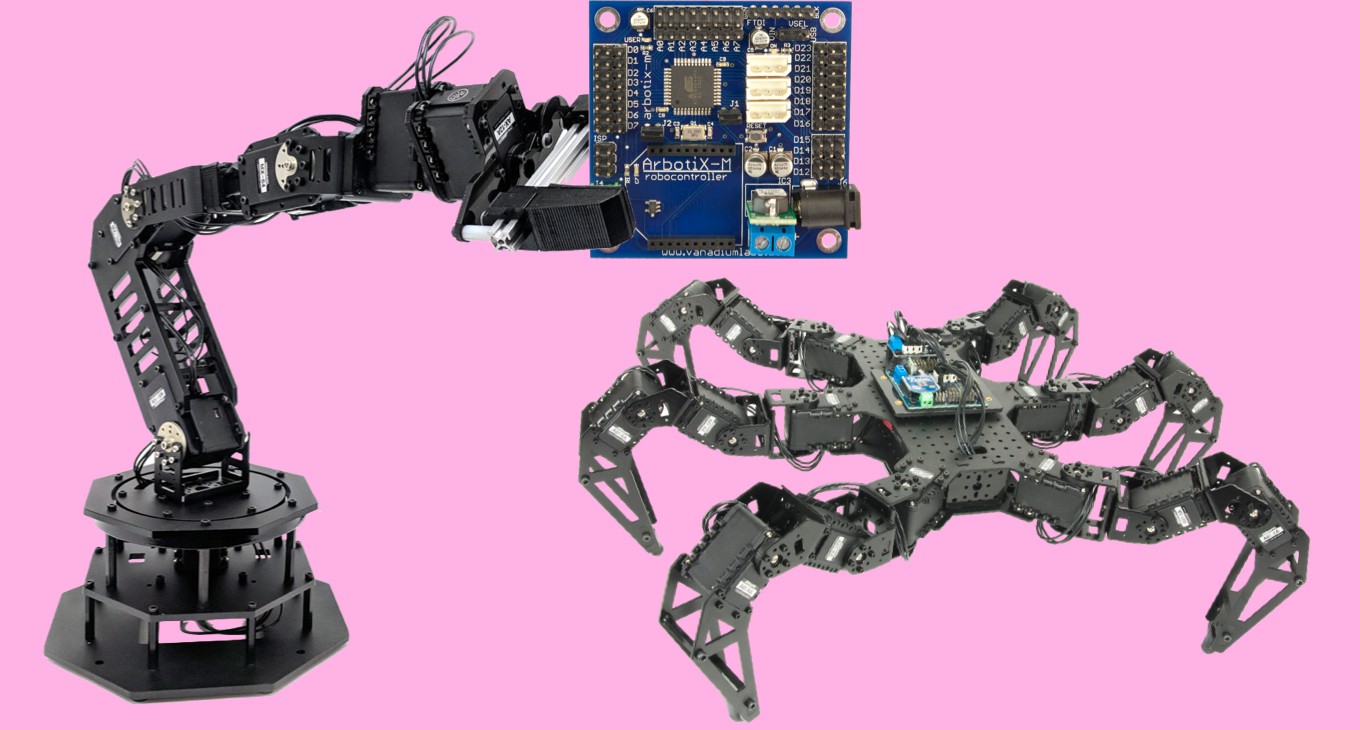
NooTriXThe ArbotiX is an Arduino compatible board made for controlling small-to-medium size robots. It targets projects with AX/MX/RX/EX Dynamixel servos and BIOLOID robots. The library is rich with many powerful but hidden features. Unfortunately, the code base is scattered and there are only few examples. Beside, most of the provided code is obsolete or undocumented.
Since there are many gems in there, I decided to clean up the code and make a through documentation for myself. It covers all aspects that might be useful to Dynamixel servo users in large. I provide many running examples that I've tested. They will help you easily program your legged robots or robotic arm. Here is the list of the topics I discuss with links. Each section also links to code examples I developed and existing working libraries that I gathered in my github Arbotix repository. All the code is under the GPL 3 free software license.
- Arduino IDE Setup to use ArbotiX
- Powering your servos using the ArbotiX
- Dynamixel Servo IDs Assignment
- Read Power Voltage Supplied to Servos
- Blink Servo LED
- Read-Write Servo Position
- Controlling Dynamixel Servos’ Speed and Mode
- Torque, Temperature, and Safe Servo Operations
- Synchronizing Rotations of Multiple Servos
- I don’t have and ArbotiX board. Can I control Dynamixel servos with an Arduino Uno?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.