 Frank Buss
Frank BussYou can program an iCE40 FPGA with a microcontroller, for example an Arduino with 3.3V IO. I tested it with a SparkFun SAMD21 Mini Breakout and a custom board. This is the setup:

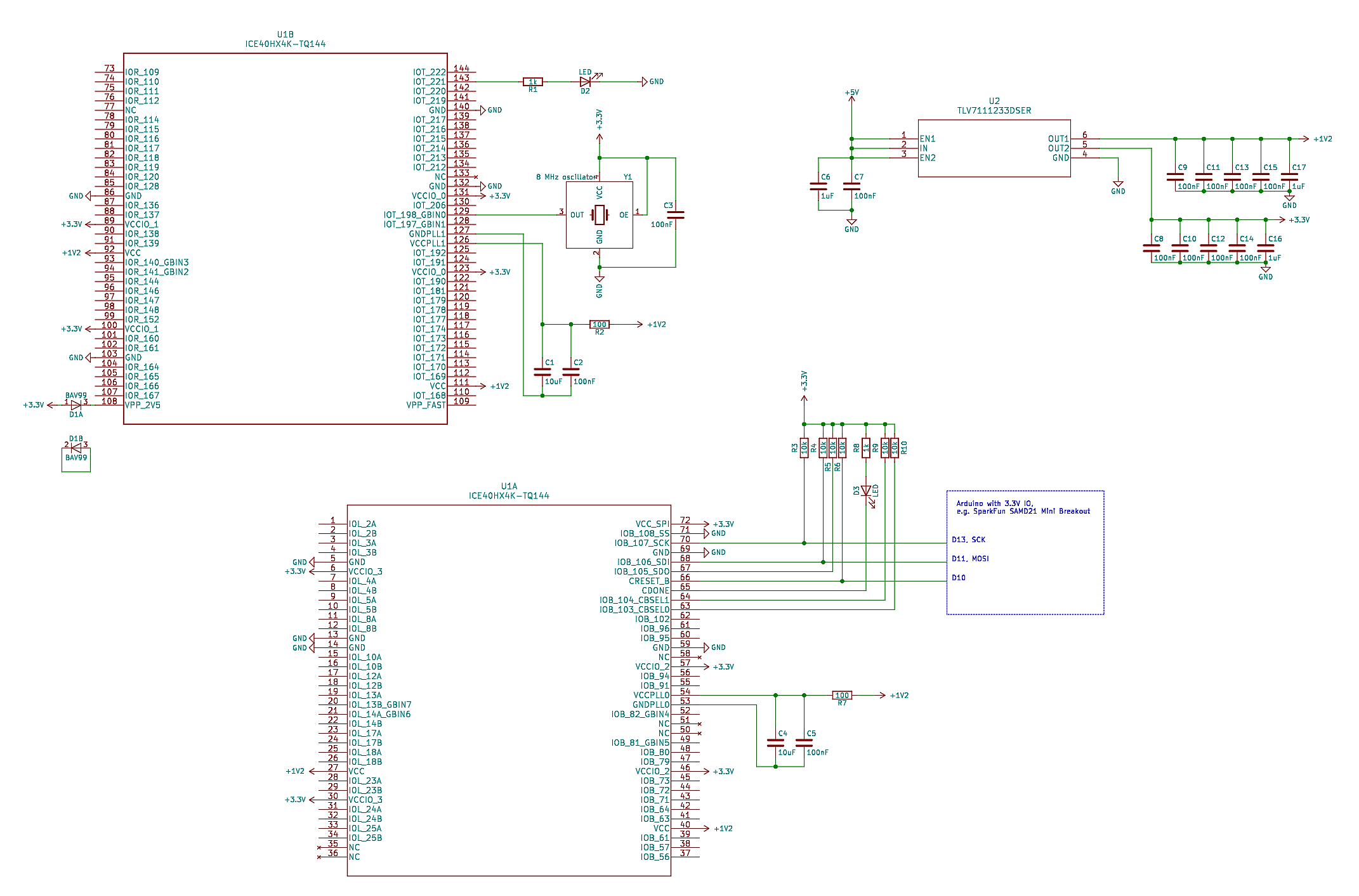
I have an additional flash and SRAM on my board, but you don't need this for a minimal test setup. This is the minimal circuit diagram how to use the FPGA (click on the image to zoom in) :
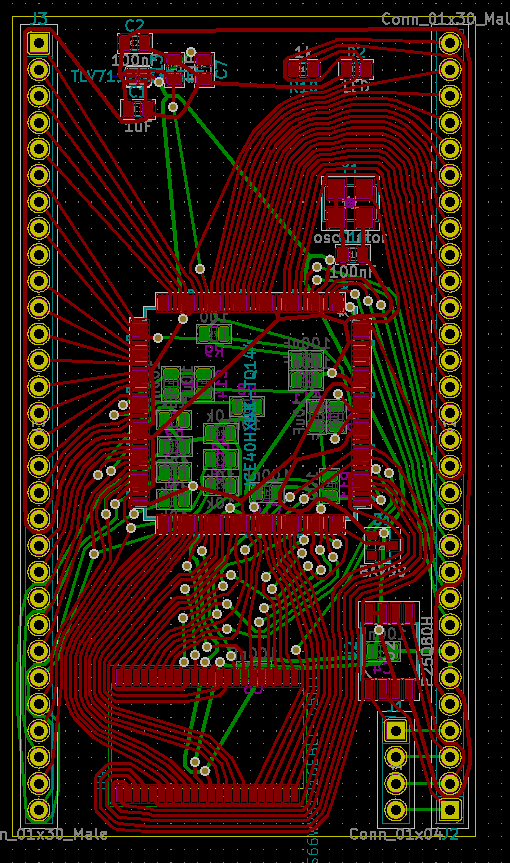
The routing was done with TopoR:
With the iCEcube2 IDE I wrote this test program:
library IEEE;
use IEEE.STD_LOGIC_1164.all;
use IEEE.numeric_std.all;
entity top is
port (
clk : in STD_LOGIC;
led : out STD_LOGIC
);
end top;
architecture Behavioral of top is
signal blinker : natural range 0 to 25000000;
signal blink : std_logic;
begin
process (clk)
begin
if rising_edge(clk) then
blinker <= blinker + 1;
if blinker = 4000000 then
blinker <= 0;
blink <= not blink;
end if;
led <= blink;
end if;
end process;
end Behavioral;
When I compile it, I get the file "test_Implmnt/sbt/outputs/bitmap/top_bitmap.bin".
It is easy to configure the FPGA: First set the CRESET_B pin to low to reset the FPGA. Then hold down the SS pin and set CRESET_B to high, which starts the SPI slave configuration mode. You can then send the bin file data with the SDI and SCK pins.
On the Arduino side I wrote this script for the transfer:
#include <SPI.h>
#define RESET_PIN 10
#define ACK 6
#define NAK 21
const int BUF_SIZE = 128;
uint8_t buffer[BUF_SIZE];
void setup() {
pinMode(RESET_PIN, OUTPUT);
SerialUSB.begin(115200);
SPI.begin();
SPI.beginTransaction(SPISettings(1000000, MSBFIRST, SPI_MODE0));
}
void readBlock() {
// wait for block start
unsigned long t0 = millis();
while (true) {
if (SerialUSB.available()) {
break;
}
unsigned long t1 = millis();
if (t1 - t0 > 1000) {
// timeout
SerialUSB.write(NAK);
return;
}
}
// read data
int received = SerialUSB.readBytes((char*) buffer, BUF_SIZE);
if (received != BUF_SIZE) {
// timeout
SerialUSB.write(NAK);
return;
}
// send with SPI
SPI.transfer(buffer, BUF_SIZE);
// acknowledge
SerialUSB.write(ACK);
}
void loop() {
// read command
char cmd;
while (true) {
if (SerialUSB.available()) {
cmd = SerialUSB.read();
break;
}
}
// execute command
switch (cmd) {
case 'r':
// reset
digitalWrite(RESET_PIN, LOW);
delay(10);
digitalWrite(RESET_PIN, HIGH);
delay(10);
SerialUSB.write(ACK);
break;
case 'b':
readBlock();
break;
default:
SerialUSB.write(NAK);
}
}
And then I could upload the bin file with this Python script:
#!/usr/bin/python3
import serial
ACK = 6
NAK = 21
ser = serial.Serial('/dev/ttyACM0', 115200, timeout=1)
# read and evaluate response
def readResponse():
d = ser.read(1)
if len(d) == 0:
raise Exception('response timeout')
if d[0] == ACK:
return
if d[0] == NAK:
raise Exception('NAK received')
raise Exception('unkown response')
# send a command
def sendCommand(cmd):
ser.write(cmd.encode())
readResponse()
# send a block
def sendBlock(data):
ser.write('b'.encode())
for d in data:
ser.write([d])
readResponse()
# read file and add some bytes at the end for the required 49 clocks for configuration
inputFile = open('top_bitmap.bin', 'rb')
bufSize = 128
data = bytearray(inputFile.read()) + bytearray([0] * (bufSize * 2))
# reset FPGA
sendCommand('r')
# send data to FPGA
while len(data) > bufSize:
block = data[:bufSize]
data = data[bufSize:]
sendBlock(block)
At the end of the upload the CDONE pin goes low, if there was no error. I added an LED to it which goes off when it is done.
The other LED on pin 143 blinked with 1 Hz after the configuration, as programmed in the VHDL file.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.