 Patrick Joyce
Patrick Joyce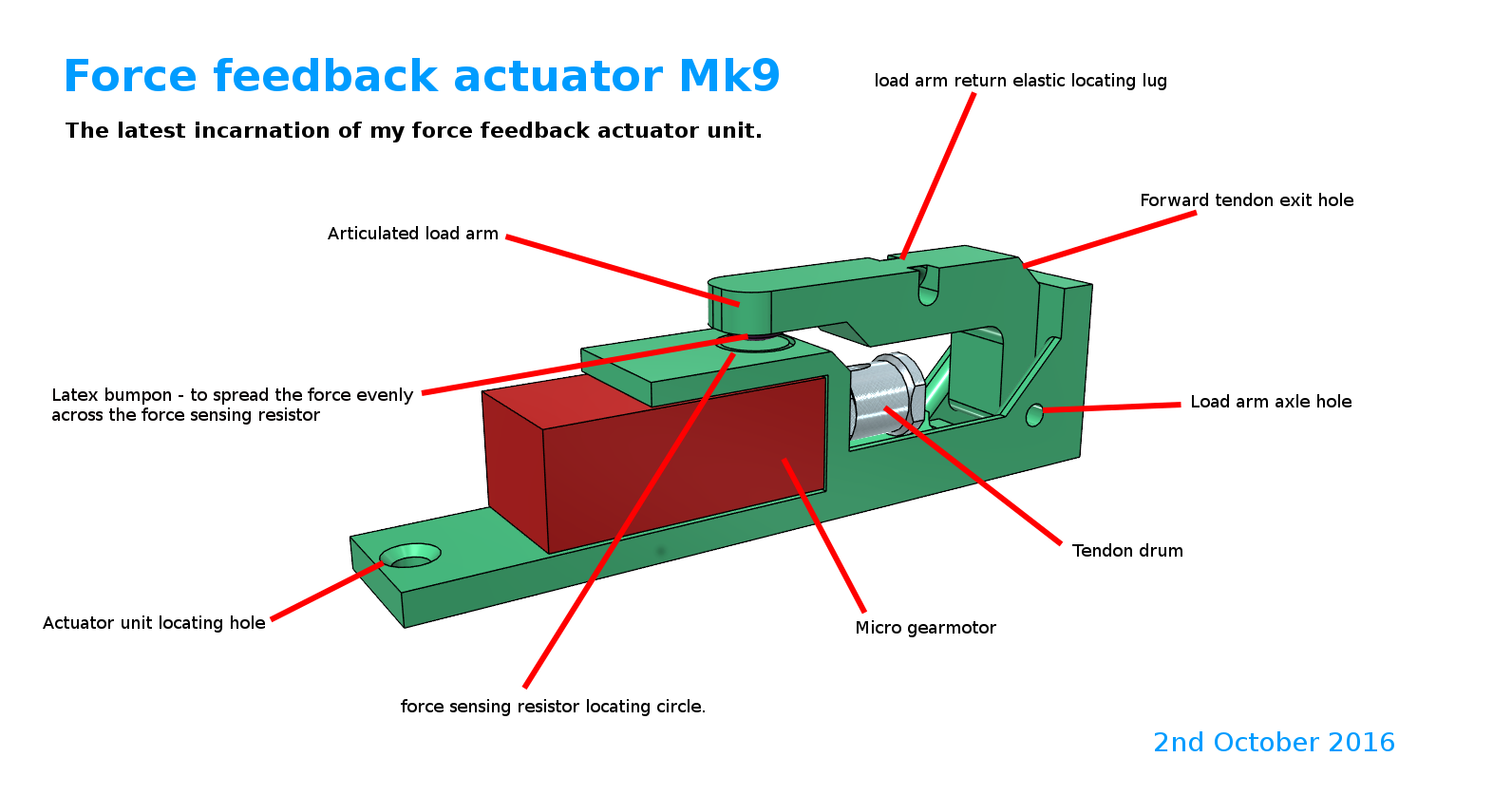
Since the last update I've been busy refining the design for the force feedback actuator, to increase its sensitivity range as much as possible (to enable a range of grip strengths). I also realised that it would be extremely helpful if it could sense when the tendon wire went slack. In normal operation this only happens when the fingers are opened out flat. Sensing when the fingers were flat would allow them to stop there, without any of the programming gymnastics the previous system would have required. The tendon wire going slack, could also occur in a situation when the closed fingers were physically prevented from opening for some reason. If this happened, then the danger is that the motor would unwind the tendon drum, despite there being no tension in the tendon wire. This would result in a tangled snarl of tendon wire inside the drum housing – potentially stopping it working entirely.
My early designs had the load arm able to move freely when the tendon wire lacked tension. This worked fine on the stationary test rig, but would have produced unpredictable results when the arm was used in practice (gravity coming from different directions as the arm was used). So I've added a load arm return spring in the latest design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.