 JRodrigo
JRodrigoFor the first board design I opted for a basic design, like a breakout board. Once the prototype works correctly. But in the future the best option is to integrate a microcontroller to get the measurement and control the motor speed, obtaining this data via I2C, SPI, ...
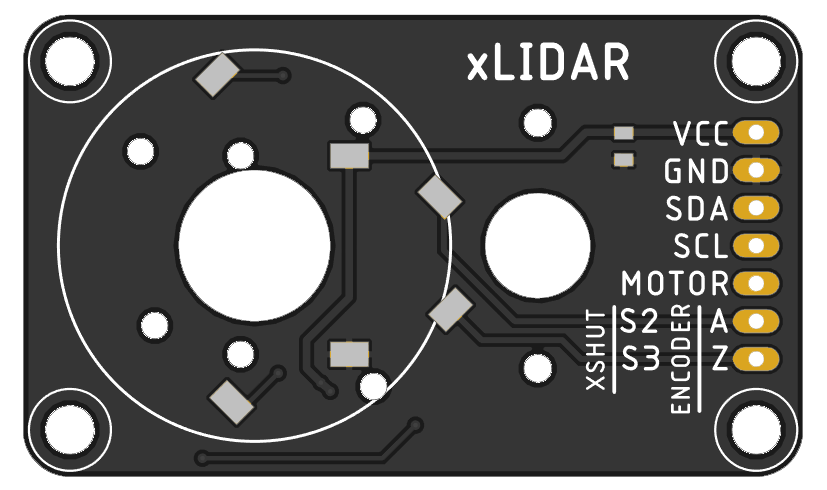
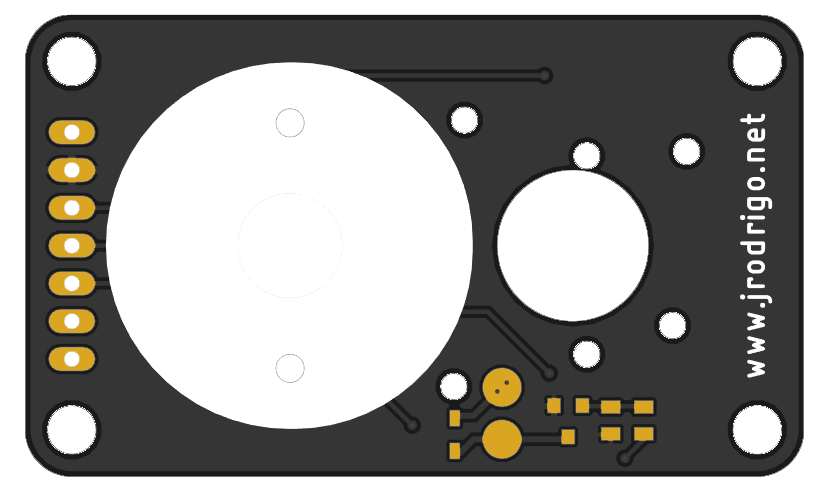
Main board breakout
It's just a board with a MOSFET to control the motor speed and a pin header for the signals. To carry the rotor signals (VCC,GND,SDA,SCL,XSHUNT+ENCODER) I'm going to use the pins from a SD card slot.
Top rotor for 3x VL53L0X ranging sensor
I have implemented the encoder and the zero position using the same XSHUNT signals. When the sensor initializes, the I2C addresses are configured using XSHUNT signals, after that this signals are used as encoder (to control the speed) and the zero position.


Source files
The boards are designed with Eagle 9 without schematics because I designed the board directly without it. But I will make them if this first revision works as expected =)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I think this is a cool project. Thanks for sharing your idea !
Are you sure? yes | no