 Mike Rigsby
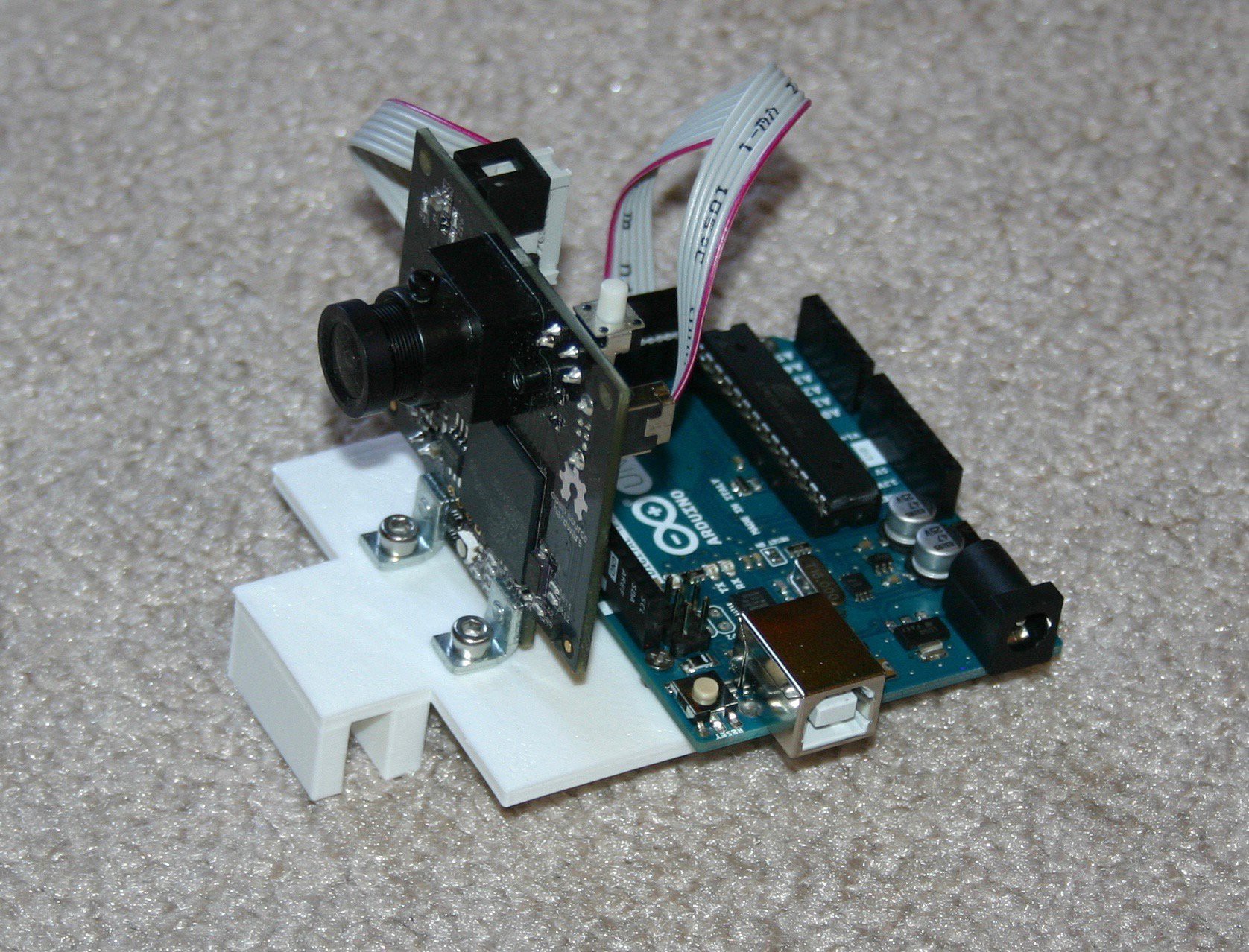
Mike RigsbyMato needs to be able to find her home station to recharge and the Pixy camera (charmedlabs.com) will enable her to locate a particular color (or combination group) to get home. The camera and Arduino draw 225 mA when active, but they can remain off until she needs them. When the target color is ahead, the center of the color "blob" can be defined as "left, right or straight" and those instructions can be used on the drive wheels to home in on the base. First, I mounted the Pixy camera and an Arduino on a 3d printed platform. The platform (3d print file available on this site) friction fits on Mato's forehead.

For testing purposes, I installed led/resistors on pins 2 and 10 of the Arduino. I trained Pixy to the color of a bright pink ball and I used a test sketch for the Arduino (included in the files section of this site). I powered the Arduino from a usb source (this is just a test) to see if the "left," "right," and "straight ahead--left and right together" code works. It does--next I'll have to send that information to the main control board and power the Pixy from the boost converter.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.