 Daniel
DanielThis is where the idea originated:
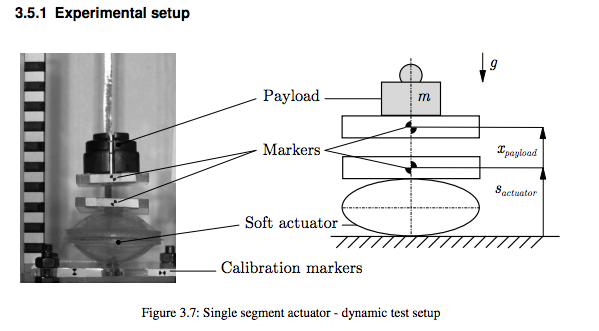
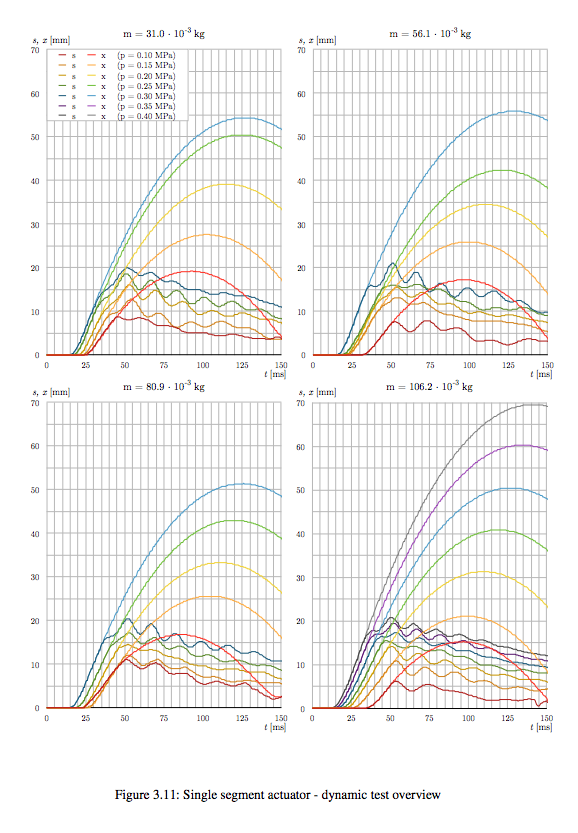
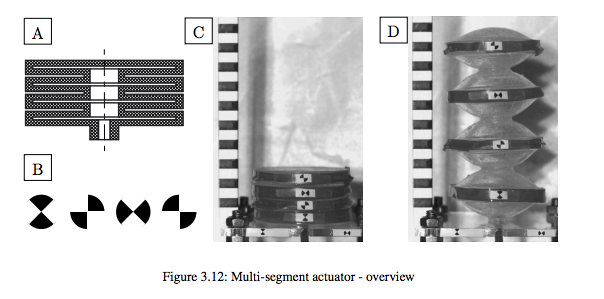
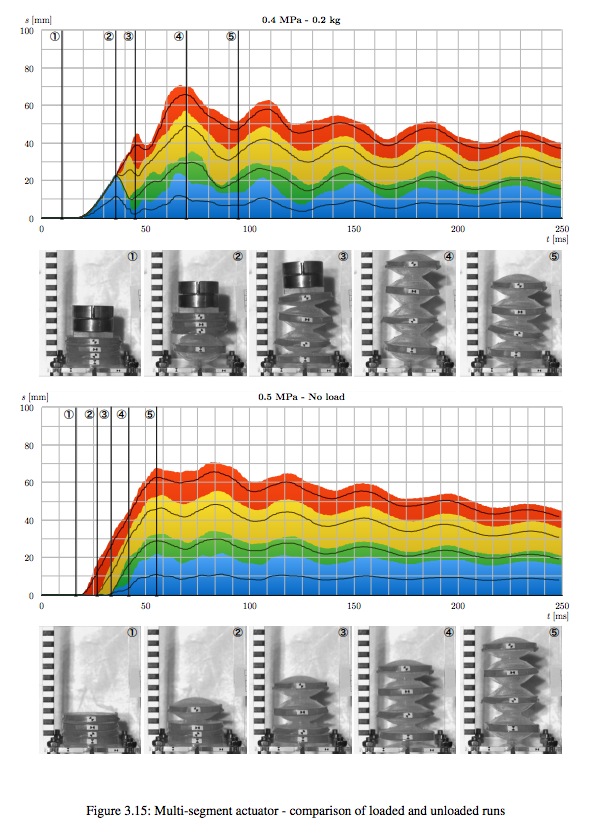
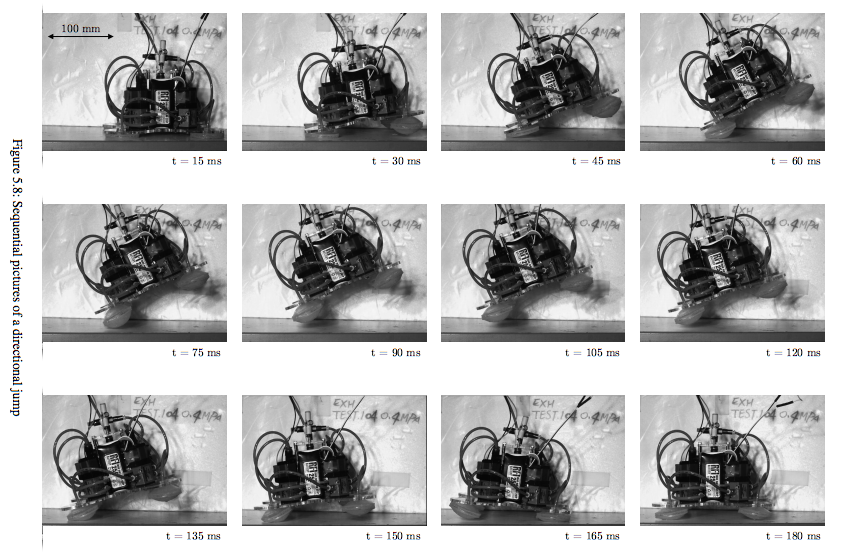
The aim was to track the expansion of a soft pneumatic actuator to be used in the leg of a jumping robot. Detailed analysis of the accelerating motion was obtained with a high-speed camera.
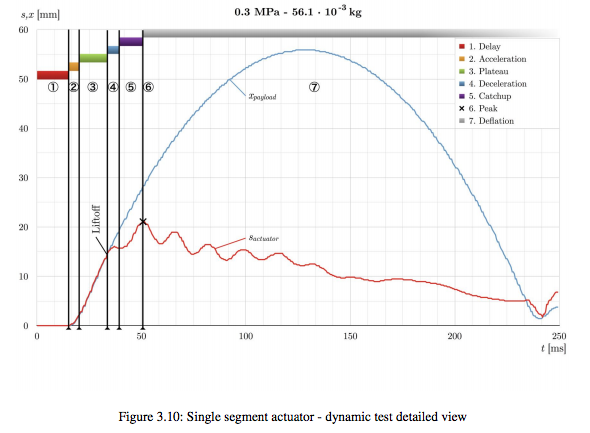
It was easy to perform lots of test runs with different parameters (air pressure, payload weight) thanks to the automated motion analysis.
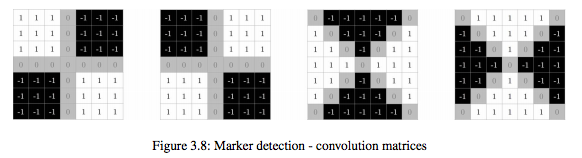
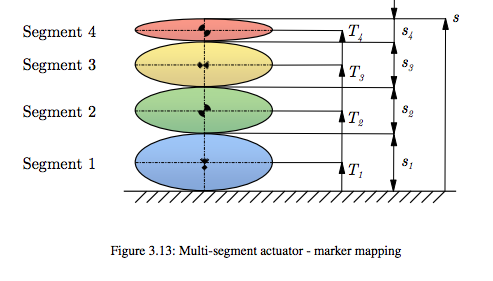
Using multiple trackers in one scene.
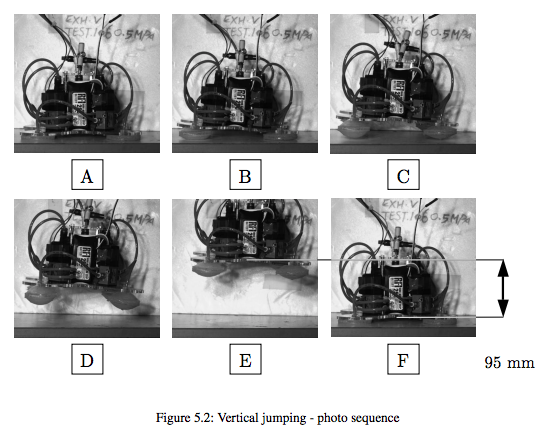
The jumping robot jumping :-)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.