 Raul Funes
Raul FunesHi everybody
Well I will start by introducing myself, my name is Raul and I´m a second year Mechatronic Engineering student at the University of Manchester. During second year I have been involved more heavily with the robotics society at the university, since I wanted to put in practice all the things I had been learning during lectures so far.
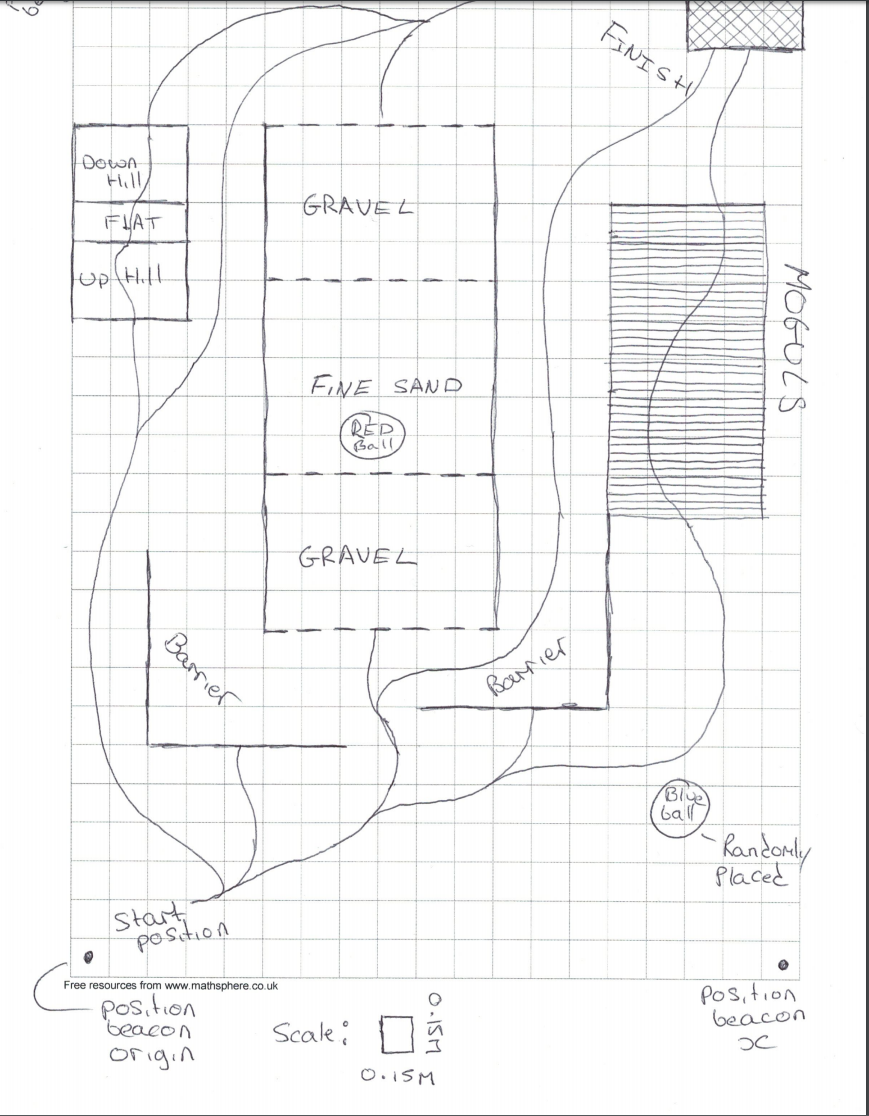
The society organise a competition to challenge the students to push their learning of robotics throughout the year. As it can be seen on the picture the competition primarily consists in building a UGV (Unmanned Ground Vehicle) or UAV (Unmanned Aerial Vehicle) which is able to navigate through different tracks or types of ground, to find and pick a red ball and take it to a predefined position. How we achieve this is up to us and our creativity…
To tackle the task, each student that joined the competition was given a set of hardware to begin with. In my case I was given a Rover5 chassis with 4 dc motors as well as 4 encoders and Arduino Nano.

I would like to share all the progress I make on this project on here. I only hope that I can share my experiences including any problems I encounter and how I (hopefully) fix them. I will be uploading all the progress as I go along and hopefully once I finish it, come back to it and edit any parts that can be further improved or made clearer.
I´ll keep you posted!!!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.