 deʃhipu
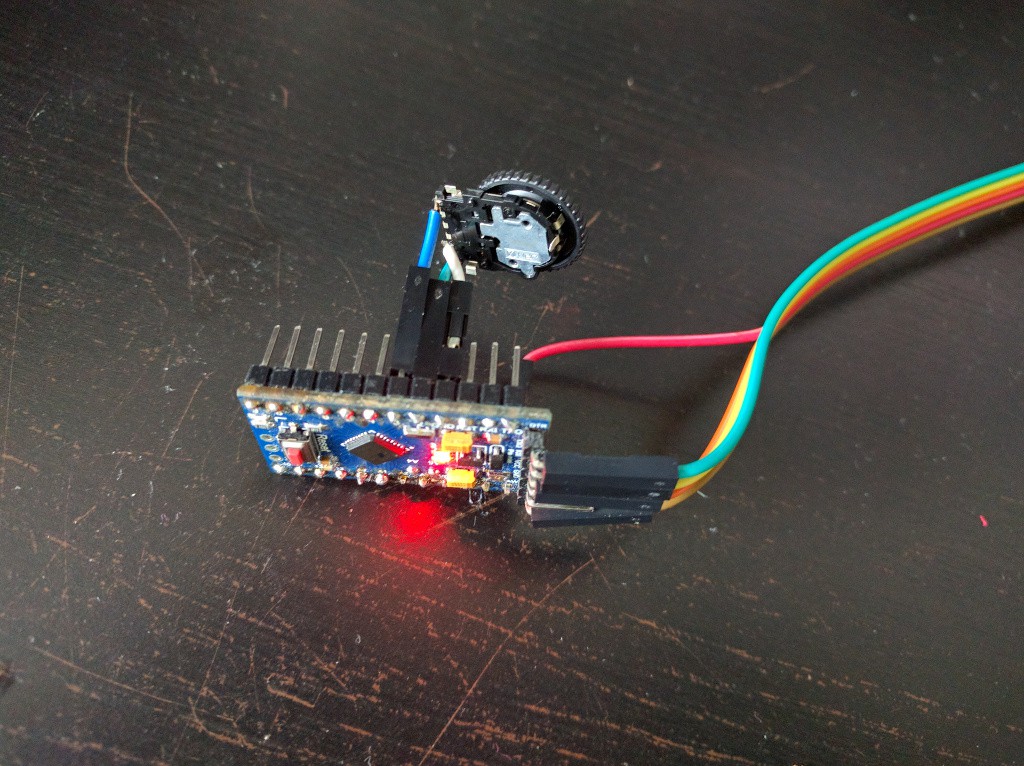
deʃhipuThe encoders arrived today, and I actually had to take a moment to read about them to understand how they work. Those are EVQWKA quadrature encoders, with an additional button activated by pressing on the wheel -- which makes them perfect as an interface for all sorts of menus or scrolling:

Inside of them there is a star-shaped contact, and two contacts that touch the prongs of the star. When you rotate the wheel, the star rotates too, and touches the two contacts. The order in which the contacts are touched tells you the direction of rotation. That's it. This particular model has one pring per "click", so you will get 10, 00, 01, 11 on rotation one way, and 01, 00, 10, 11 on rotation the other way. You can easily detect those with the pin interrupts in Arduino, but I choose to use a library from http://www.pjrc.com/teensy/td_libs_Encoder.html
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hey, nice project. Love those rotary encoders with push button embedded.
Where to purchase those?
Are you sure? yes | no