 EK
EK
With some new improvements on the power supply and drive system, we wanted to see how far Bowie can go. We packed up the robot and headed to a park with an open field, which is a great place to test out manual, compass, and eventually more GPS driving.
Manual
We manually drove the robot across the field, check out the timelapse here - don't lose sight of the robot! Video:
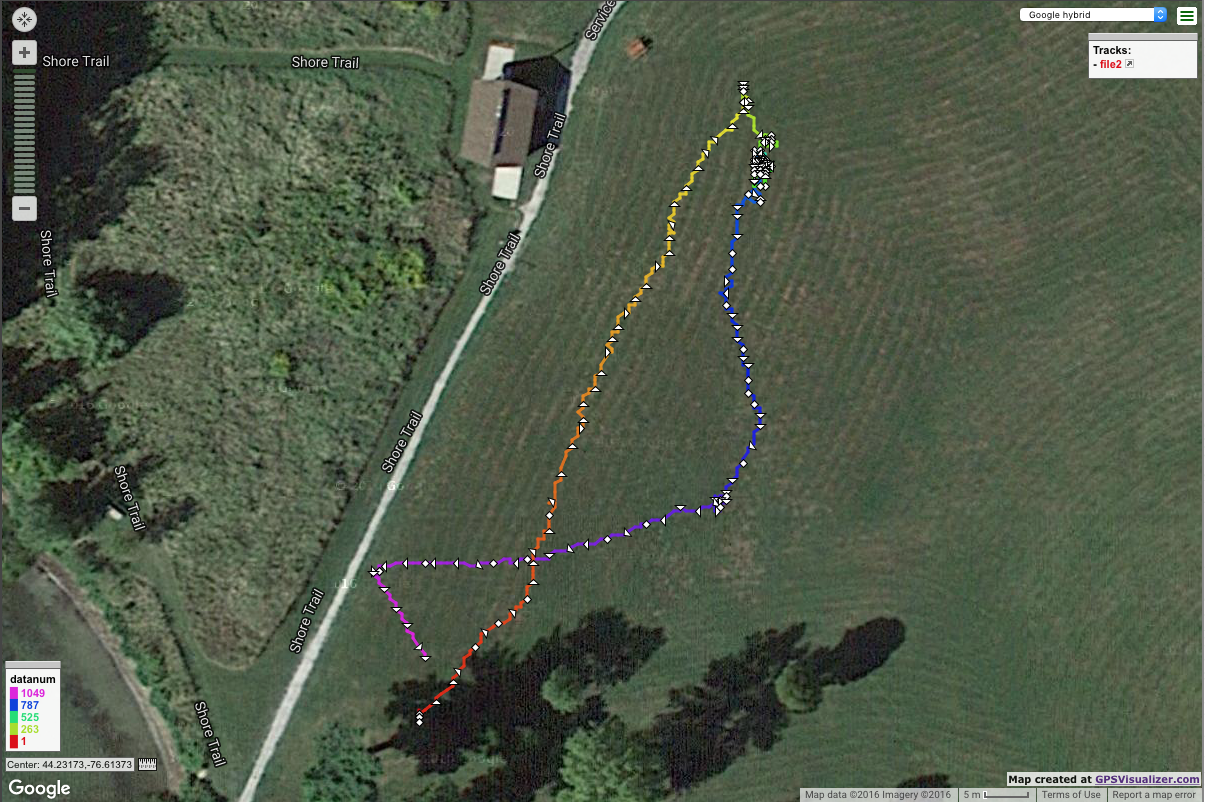
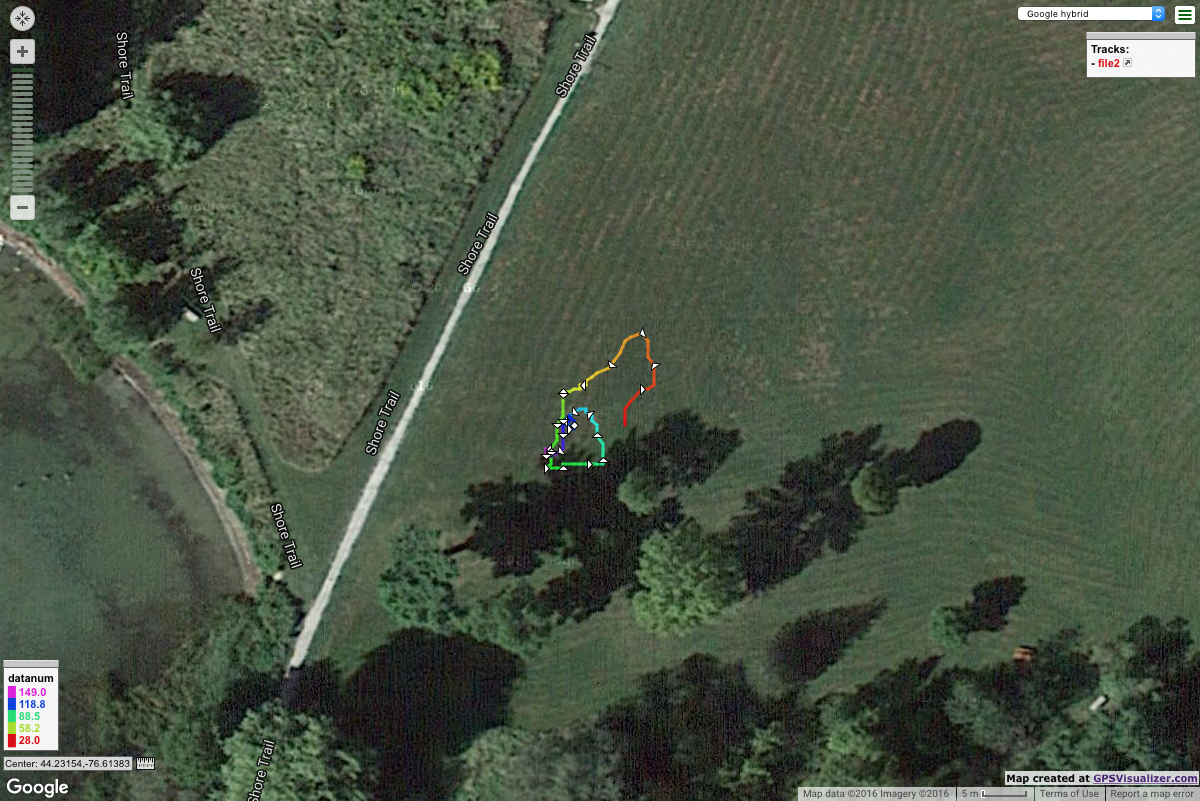
With the GPS data, we can see the path the robot was driven along:
First half the robot travelled ~120m in 15.3 mins, and second half the robot travelled ~152m in 16.3 mins.
The tickmarks are every 10 seconds - closer tickmarks mean the robot was moving slower, farther away means the robot was moving faster. This can be due to the length of the grass, and any inclination difference.
Check out the interactive version of the map here
Altitude
Using the altitude sensor, we can get a better understanding about the lay of the land:
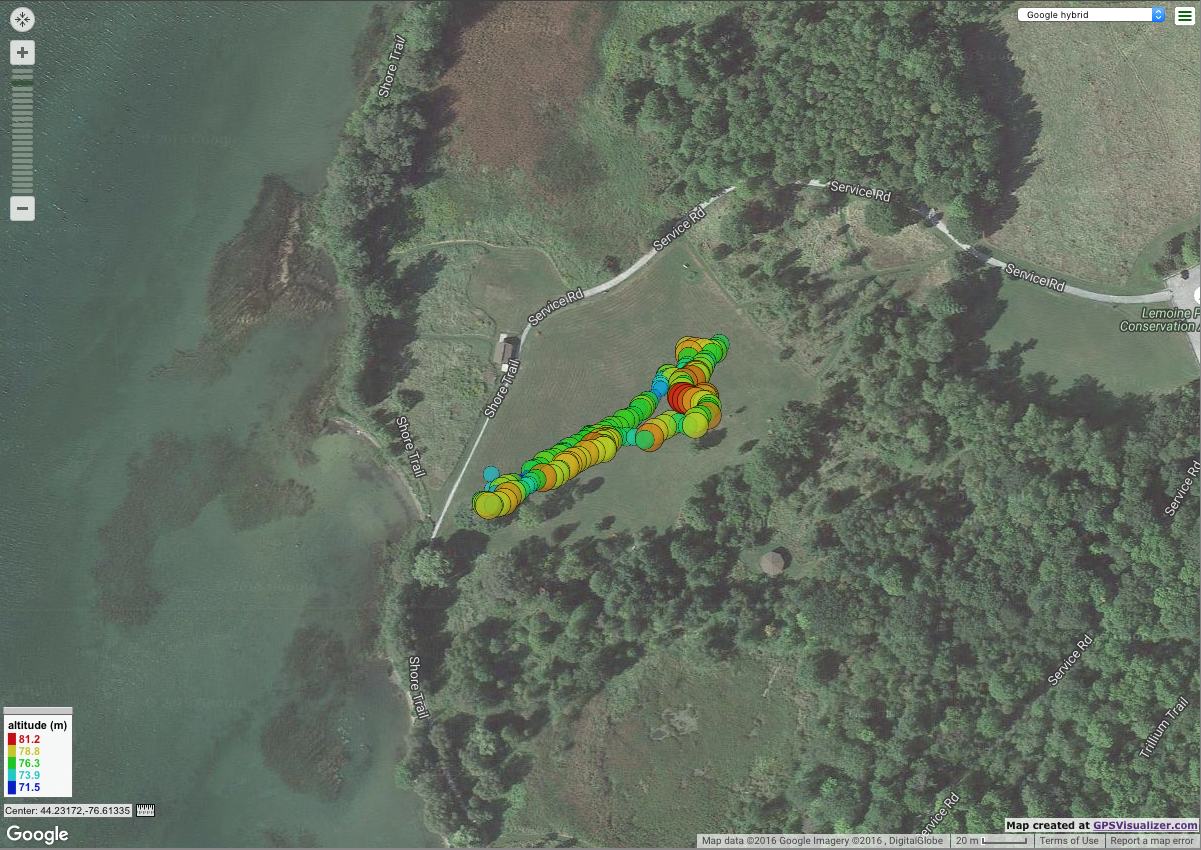
The altitude range was 71.5m to 81.2m. Larger dots represent a higher altitude. For the spectrum, red colour indicates highest and blue represents lowest.
See the map here
Compass
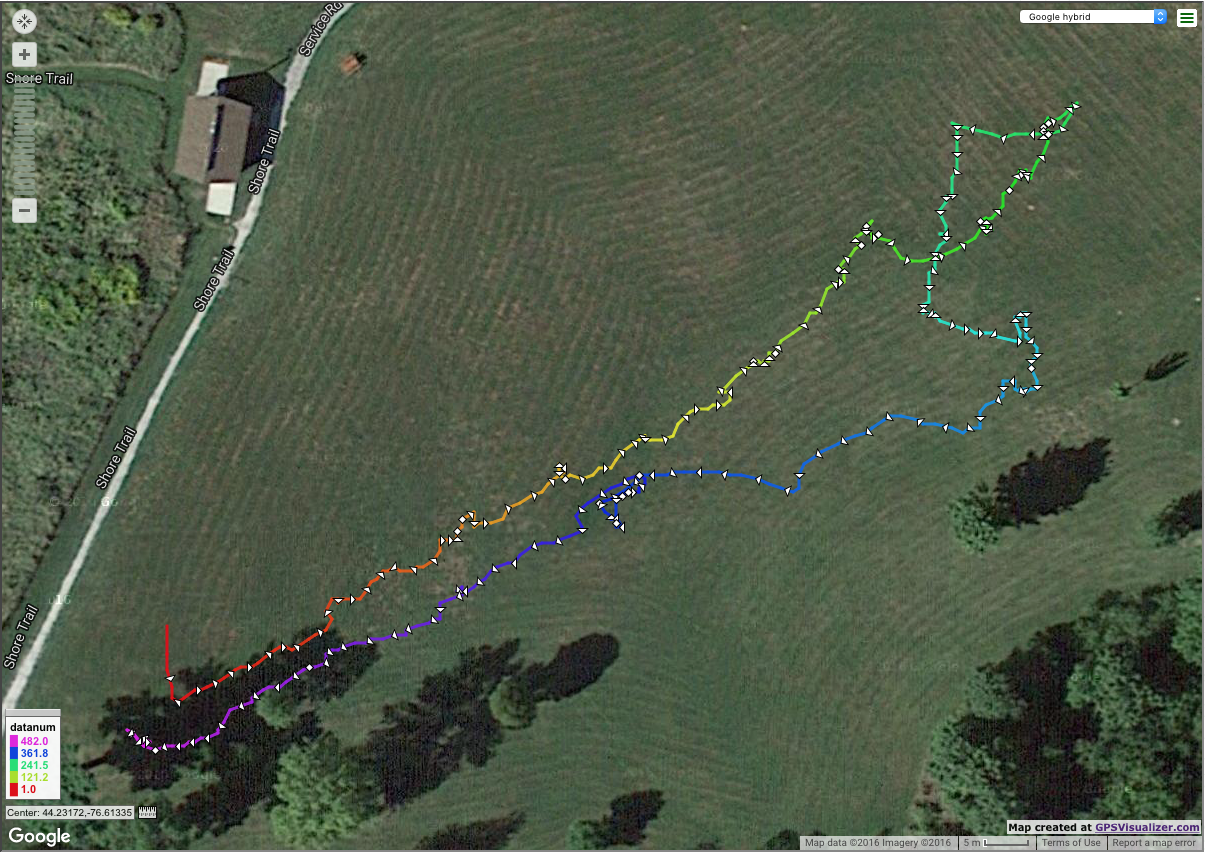
Next up was to try driving autonomously with the use of the compass
The first leg (red->yellow) of the path was not working out as planned, which lead to us having to recode the algorithm in the middle of the field in order to get the robot back to our temporary mission post.
The second leg (blue->dark blue) was improved, and changes were made on the fly.
The third leg (blue->purple) is where the changes were evident. The robot appeared to be navigating more smoothly, though we can see in the GPS data that there was a bit of an arc.
See the map here
Squares
With the compass working better, it was time to try some "squares"
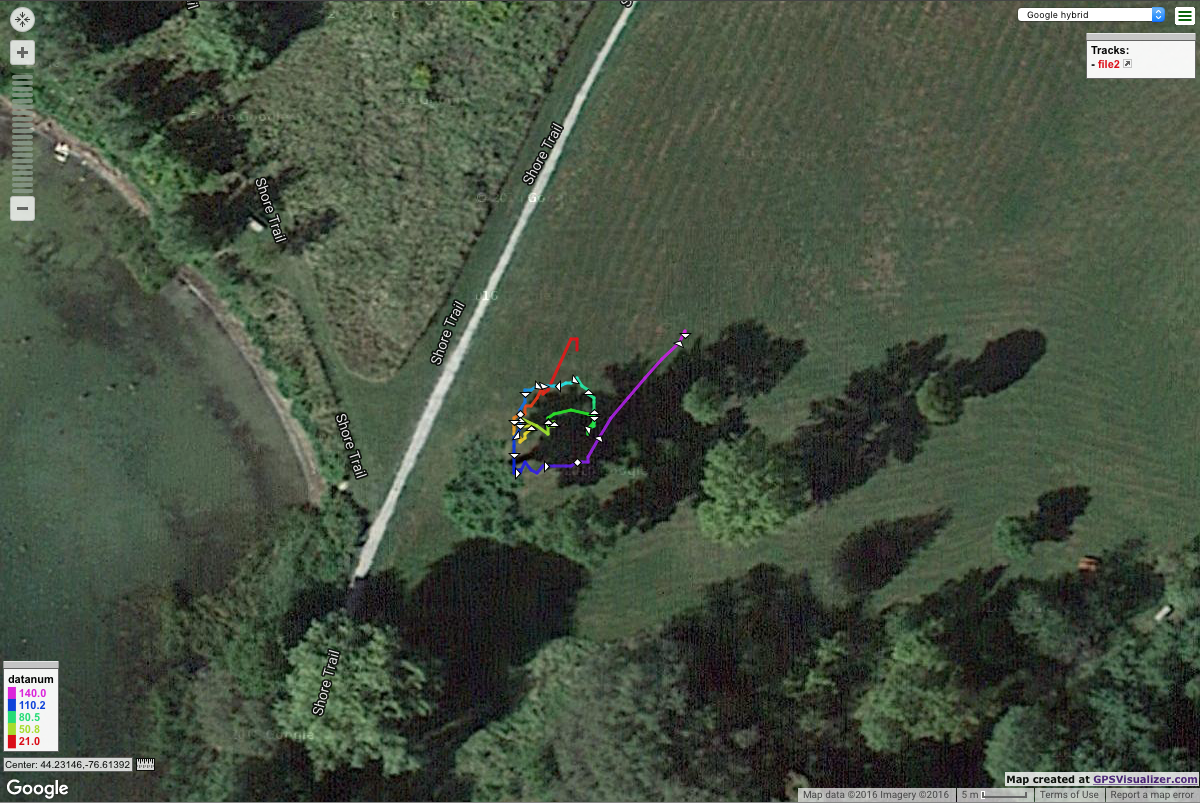
Try #2:
The squares are generated by changing the heading 90 degrees apart after a certain amount of time. The time was increased in Try #1 and Try #2.
Results & Observations
It was extremely beneficial to spend dedicated time debugging & working on the robot outdoors. Data files and python scripts for the maps can be found in this repository. Here is what we learned:
- Robot range is at least 150m using the XBees for control
- Battery lasted the entire time, still has charge
- Upgrades to drive system performed well in the grass
- Upgrades to the power supply worked excellent
- Flag poll helped with being able to see the robot from far away
- Improved compass navigation code
3 improvements to be made:
- Navigating between headings (the square)
- XBee reliability, needs to stop entering into packetization mode
- Receive indication on the controller side that the robot is still connected & alive (battery level)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Just to add on - we were looking at the compass heading in the GPS data, and seeing that the data did not make much sense. The reason for this is that the speed of the robot would have to be much greater to get a reliable result. Some forum posts we saw said 0.5 km/h - Bowie would need to be turbo charged!
Are you sure? yes | no