 EK
EKIn order to dampen the forces that are applied to the motor axel from the wheel, there needs to be a suspension system.
During instances of forces that are applied quickly - the suspension system will reduce the 'shock' (mechanical shock) that would be taken by the motor axel and the gears in the gearbox.
The application of this design will be useful along shorelines that are more rocky than soft sand.

Assembled wheel on the robot being tested in dry / slightly damp sand
The need for this was noticed in an extreme case where the upper portion of a gear was completely sheared off, and teeth were shattered within the gearbox.
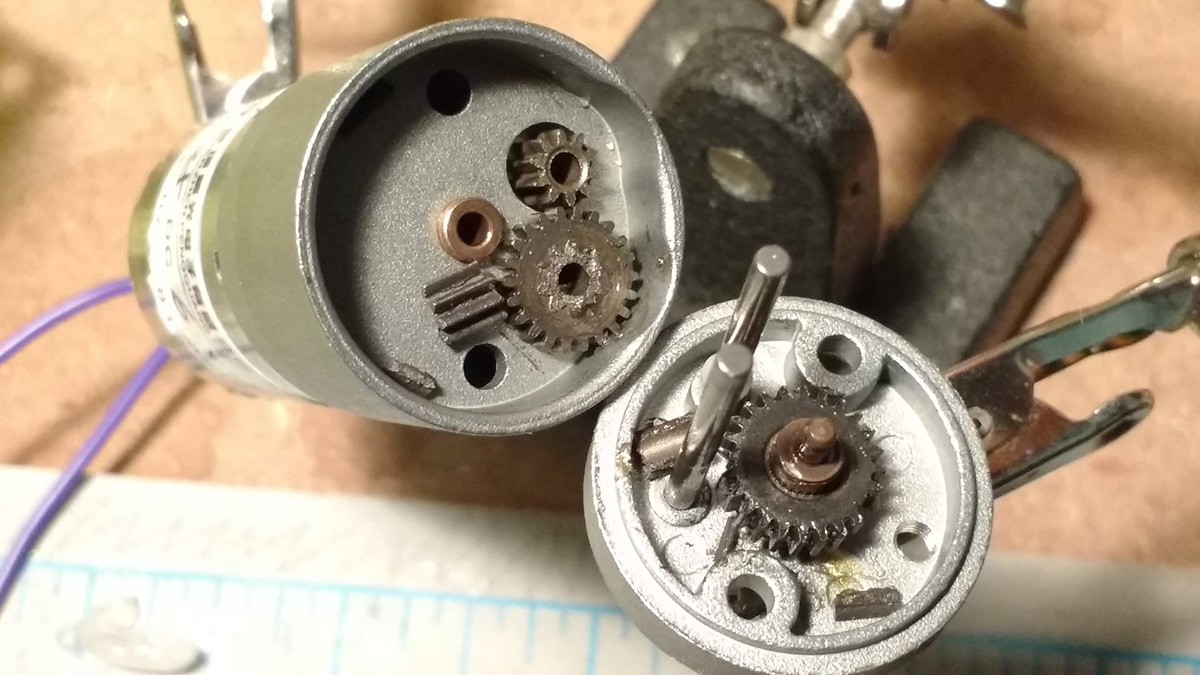
Broken gears within the 75:1 gearbox
Design
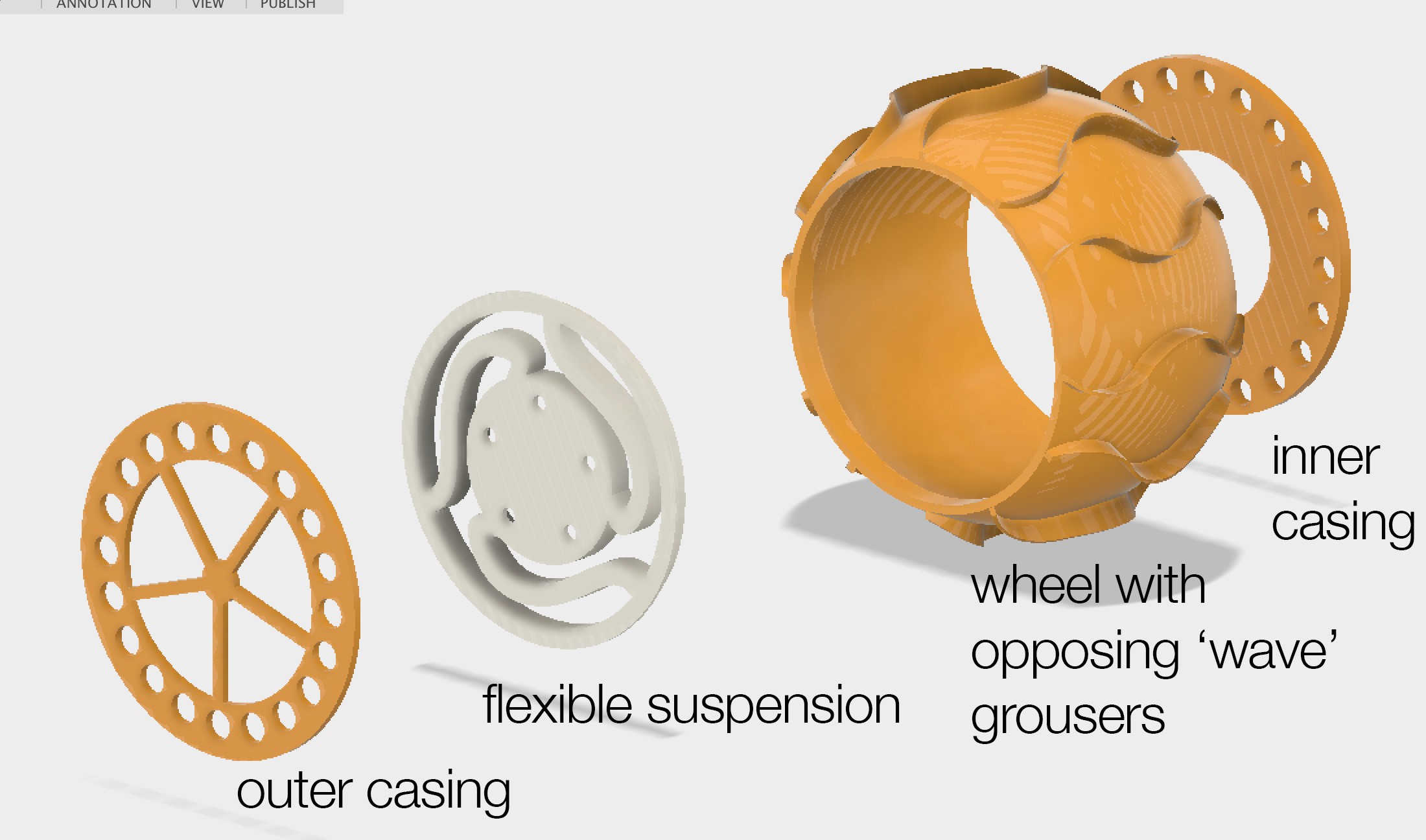
The wheel is comprised of 4 pieces:
Watch this video to see the assembly:
The flexible piece was printed with 3 perimeters and 30% infill. To increase the resistance, the width of the spline shapes can be increased, as well as the infill percentage. The material is a Thermoplastic polyurethane (TPU), rated at 91A shore hardness.
Results
Slow-motion video of the new wheel assembly in action:
With this design, we were able to use the same motors - avoiding an increase in cost if the motors were to be larger.
The benefit of this approach is that this can be fabricated on a 3D printer. No need for custom parts with springs that could break and be tricky & expensive to source. The inner flexible piece is customisable to dampen larger or smaller forces according to the terrain the robot will be used on.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.