 fbrktr
fbrktrPhoton <-> UDP <-> Akka
To make something easier to to start with, this robot will be remote controlled.
Instead of using particle cloud pub/sub feature I'll use a direct Udp link between the photon and the remote controller. It should be faster, and won't suffer the one publish/second limitation.
Particle firmware is hosted here
Remote controller code is here
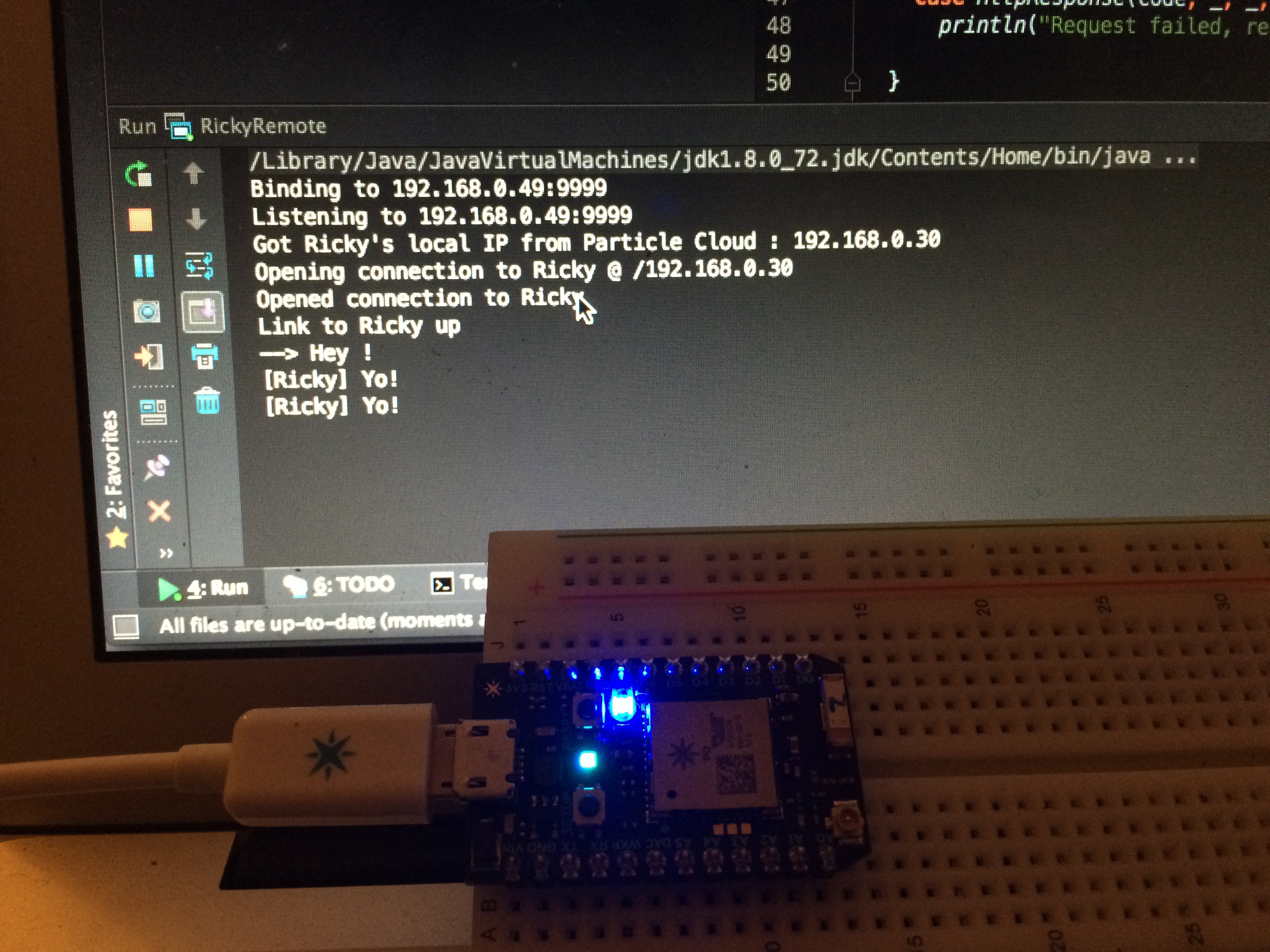
The connection process starts with the photon publishing it's local IP to the particle cloud on setup.
The controller checks that variable on startup and sends an hello message to the photon.
The photon keeps the hello message sender IP for later use and starts sending an heartbeat to the controller.
For the controller to work you'll have to define two environment variables :
PARTICLE_TOKEN PARTICLE_DEVICE_ID
Now that Ricky has a remote controller, it's time to go wireless and assemble somehow the particle to the chassis, an UI will also be useful.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.