 deʃhipu
deʃhipuI'm taking this slow, figuring things as I go. Since my other projects went bad recently (I literally fried a PCB in one, and the other is drowned in instant glue), I decided to do anything with this one. So I went and screwed the servo horns to the legs properly:

As a side note, I really love this drill handle I got at some RC model fair. It's perfect for making small, precise holes in delicate things, where a dremel wouldn't work so well. So some drilling and some M1.5x3 screws, and the horns are all properly attached.
Next, I figured a way to attach the servos. I have some of those foamed plastic sheets, and they are perfect for prototyping -- soft enough to cut with a knife, but sturdy enough to build something out of them. I initially wanted to make the whole robot from it (like I did with #µKatka), but I wasn't sure what plastic it is exactly and if I can safely put that into the laser cutter, without damaging the lens with the fumes. Anyways, I cut some squares of that, cut an additional hole for the cable in them, and glued them to the body with instant glue. Then I simply used the screws that came with the servos to attach them to that. Looks better than I anticipated:
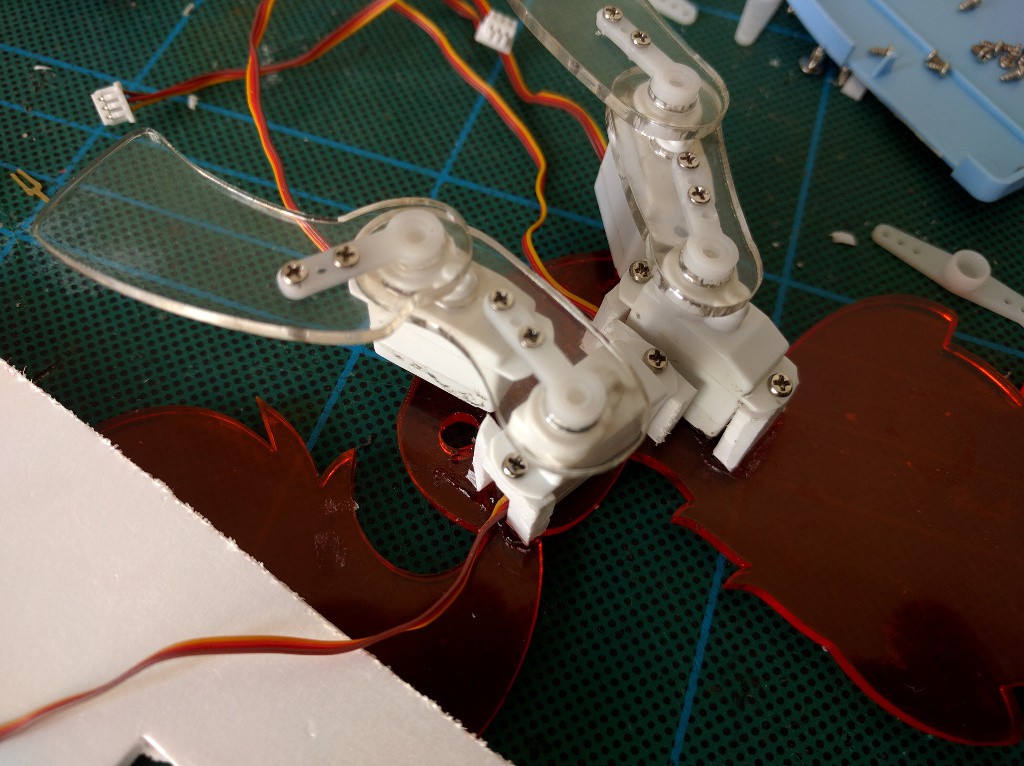
One mistake I made, and I'm going to correct that in the "clean" version -- I put the servos too high. But that should be fine for testing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.