 TK
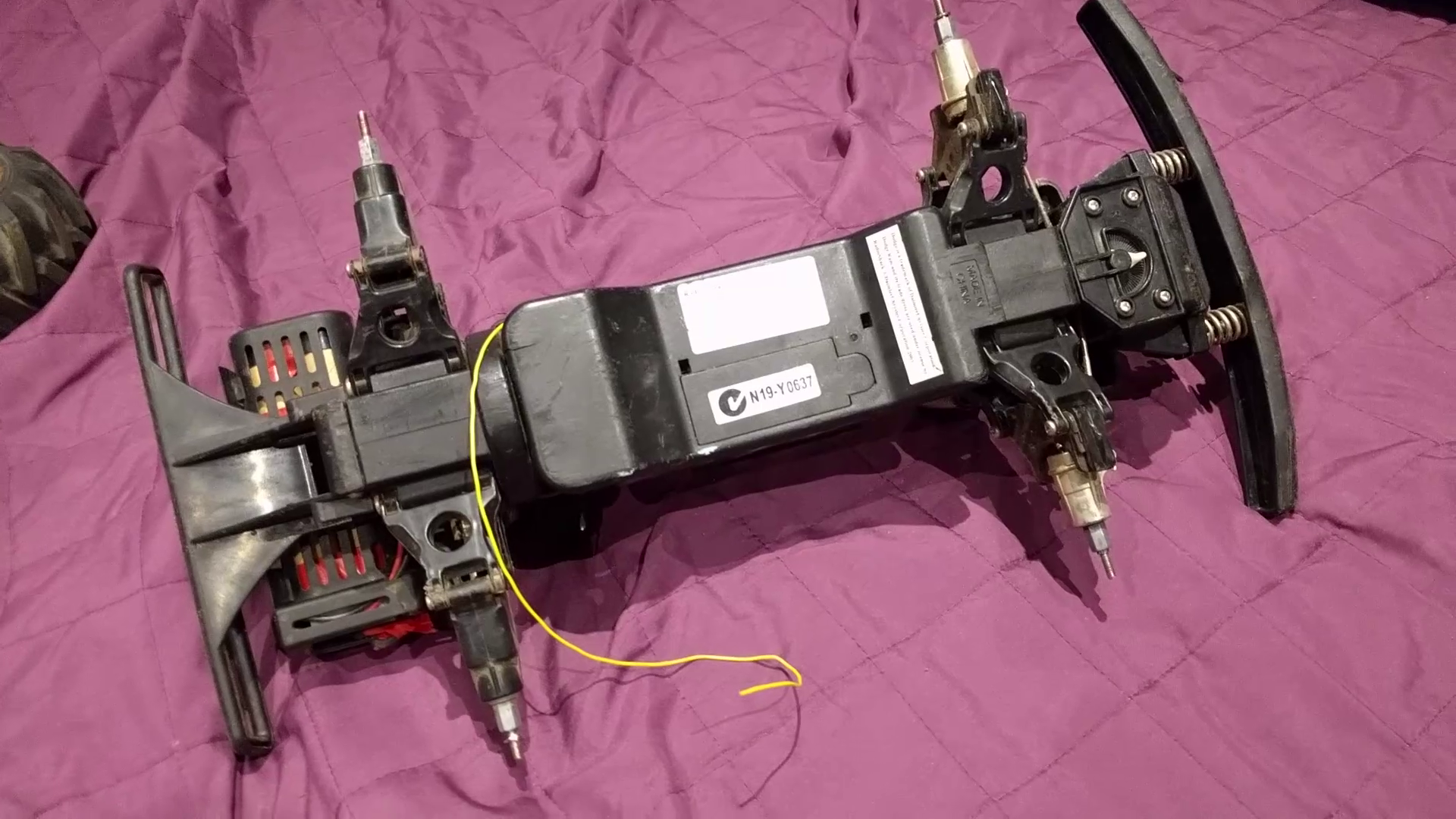
TKIn this video, I introduce the TKIRV project and what we're looking to achieve. Then I set about tearing down our base vehicle, a Radio Shack RC car from the early 2000s. It's got 4WD, front and rear suspension, and is pretty much the perfect size for the job.


The wheels come off easy - the car actually shipped with a small tool for undoing the bolts and taking them on and off. Why, I can't possibly imagine - there's nothing to achieve by doing so! Fun though.
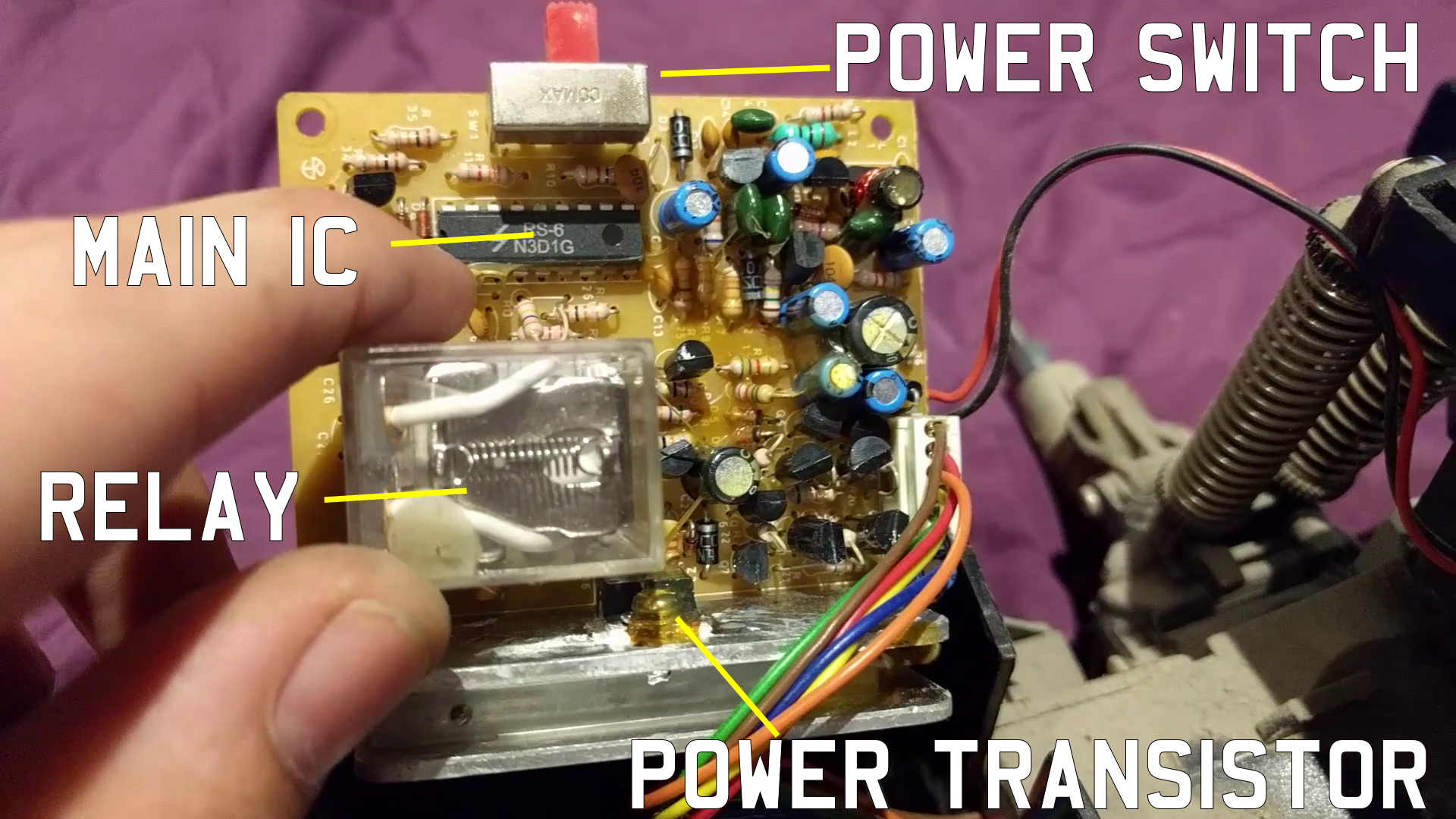
Next I took a look at the main PCB. I haven't delved too deeply yet but I have a rough idea of what does what. We have our main IC that I presume is responsible for decoding the radio signals from the original controller and controlling the steering and drive motors. We have the power transistor mounted to a heatsink which is most likely to run the main drive motor, a brushed DC unit. I have a hunch the relay is used to reverse the polarity of the motor connection to the power transistor to switch forward and reverse. It's an interesting relay, controlled by a 5V signal instead of the more usual 12V. Then we have a smattering of discrete transistors which I think are probably for helping drive the steering motor and doing other little things here and there. More investigation to come as the project rolls on.
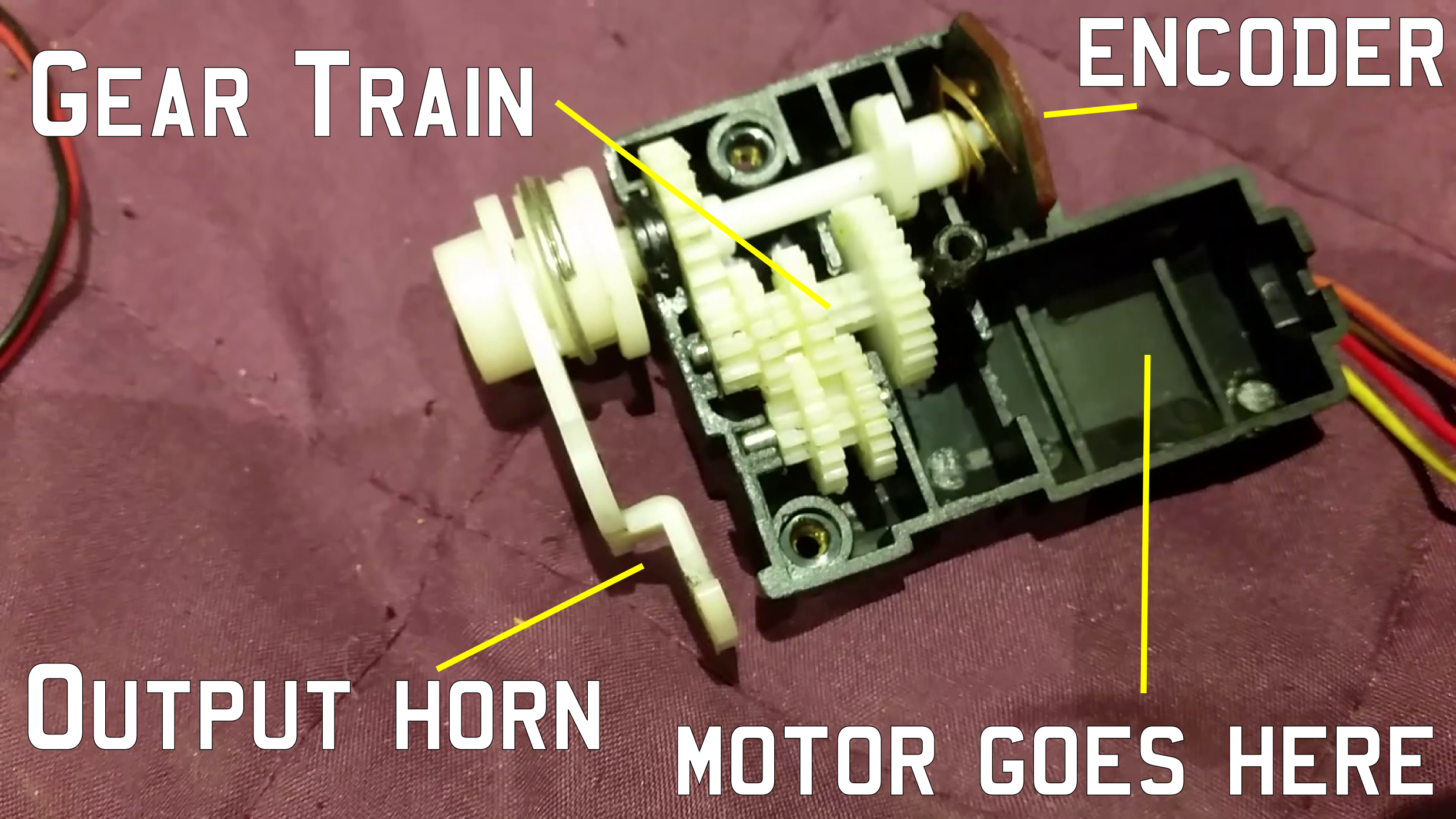
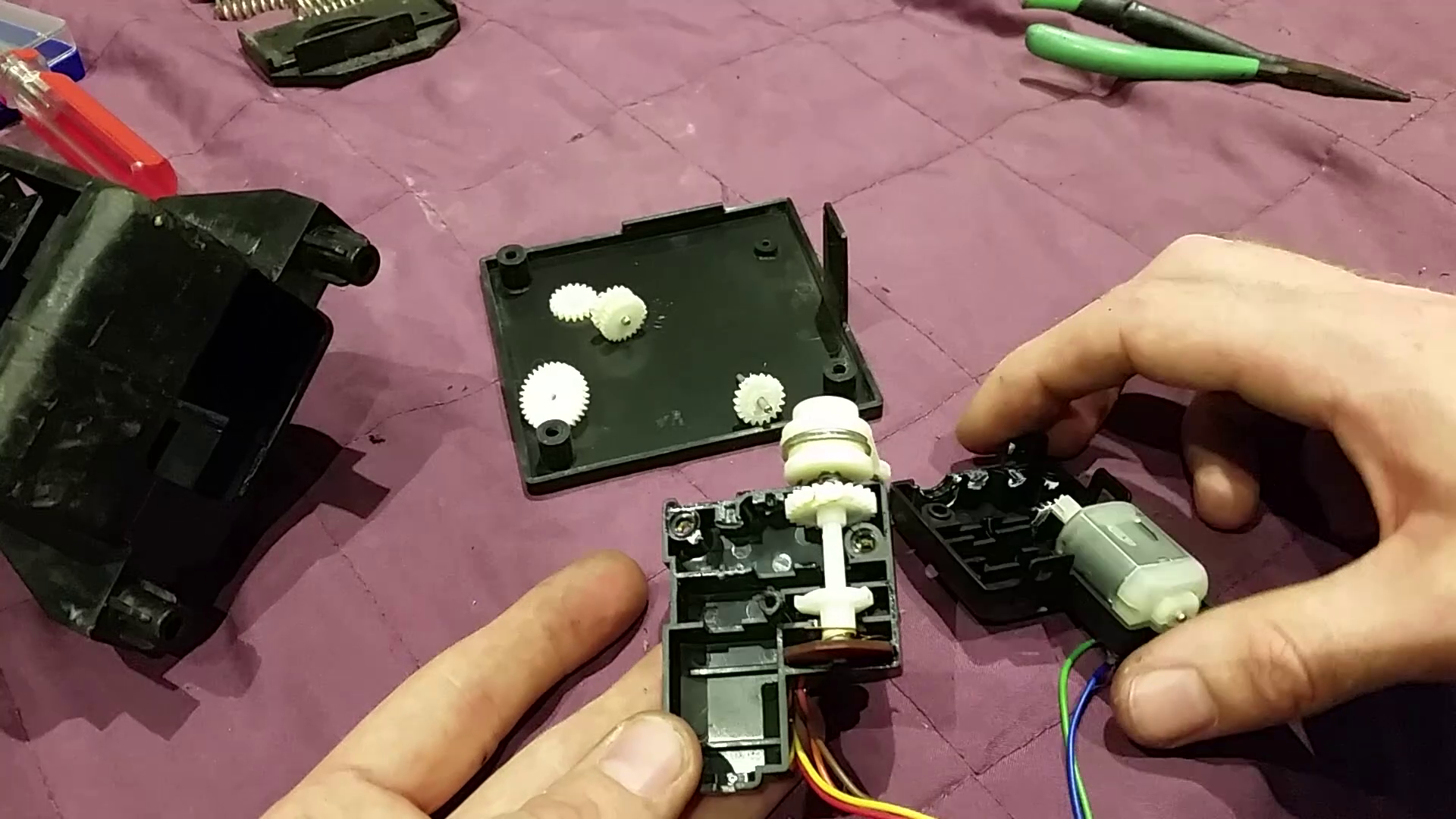
Last of all we have the steering box. This contains a small brushed DC motor, a geartrain to generate more torque, and an encoder. This allows the car to drive the front wheels back to a straight ahead position after the user stops holding left or right. It could be a bit of a headache to interface with this but I think we'll find a way.
So next on the agenda is to figure out how to interface with the main PCB to get control over the drive and steering, and to start working on the remote control of the Raspberry Pi that's going to run everything. For more detail on the teardown, watch the video at the top of this post, and keep an eye out for the next update!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.