 Dennis
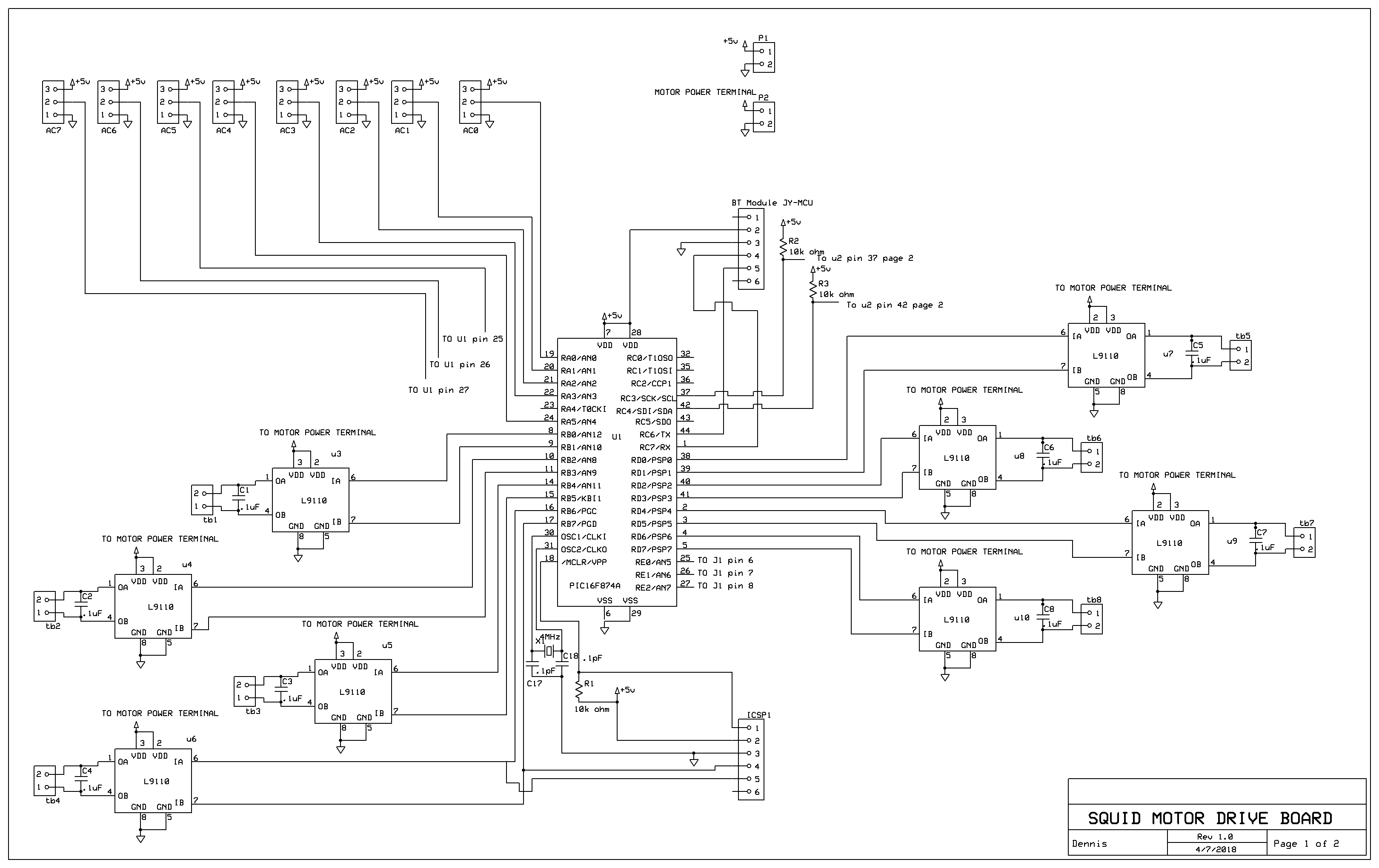
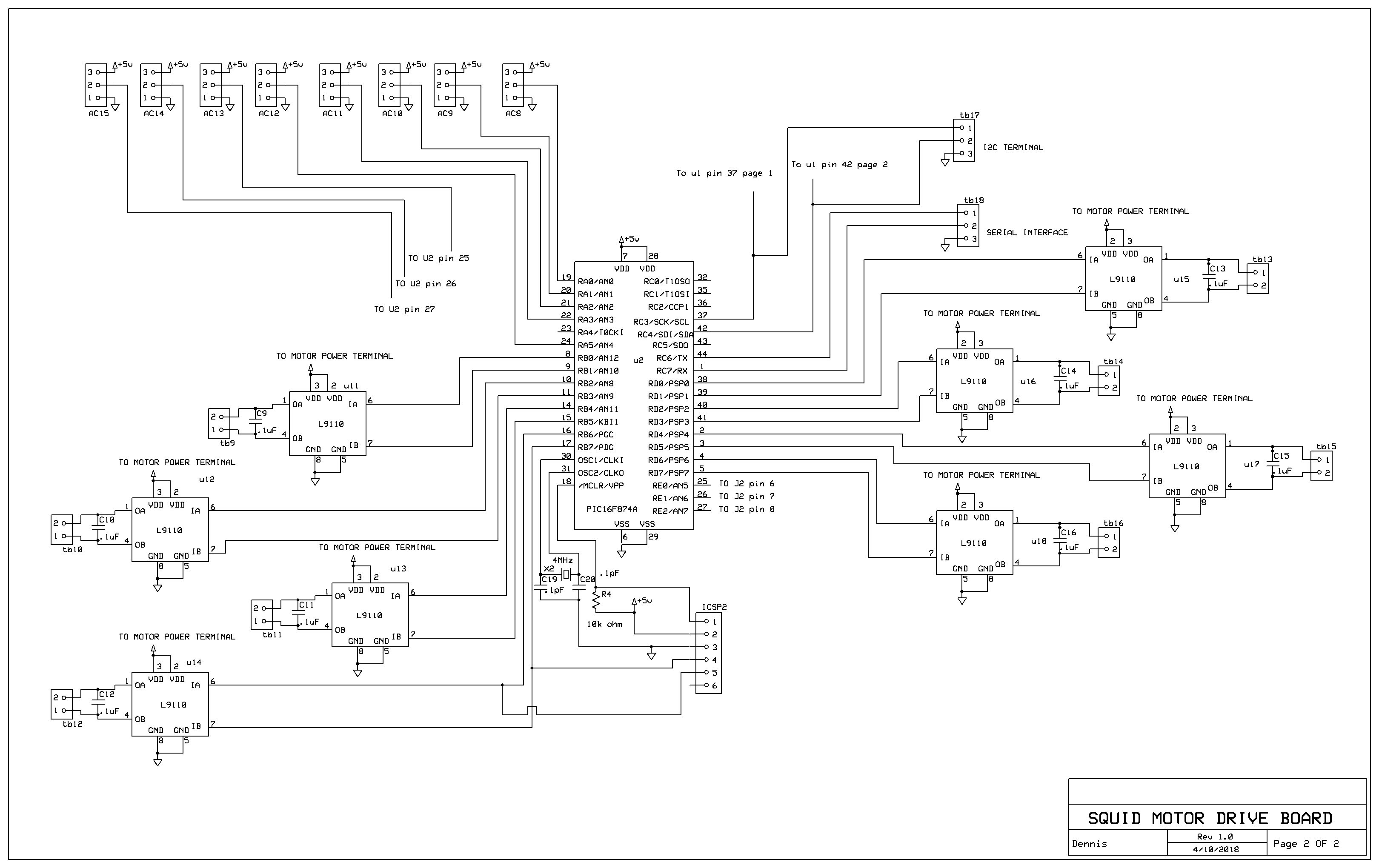
DennisI finished the preliminary schematics. I’ve decided to base the first Squid prototype around two PIC16F874A controllers. The two PICs will communicate to each other and also other off board peripheral devices via an I2C interface. PIC one will be able to communicate with higher level controllers with a Bluetooth module through the PICs onboard USART. The second PIC will be able to communicate to higher level controllers through a direct serial interface via again the PICs onboard USART. Using two PICs will supply the resources to handle the 16 individual H-bridges and 16 I/O ports.
The Squid board will be fairly small even though the schematics are in two sheets.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.