 Gene Foxwell
Gene FoxwellIn order to compare different methods for having the swarms adapt their behavior I need a baseline. To get this baseline I have setup a static environment with static goals in the simulation and run the simulation 20 times using 25 drones. The simulation counts the number of iterations until all the goals have been collected and reports that value back to the screen.
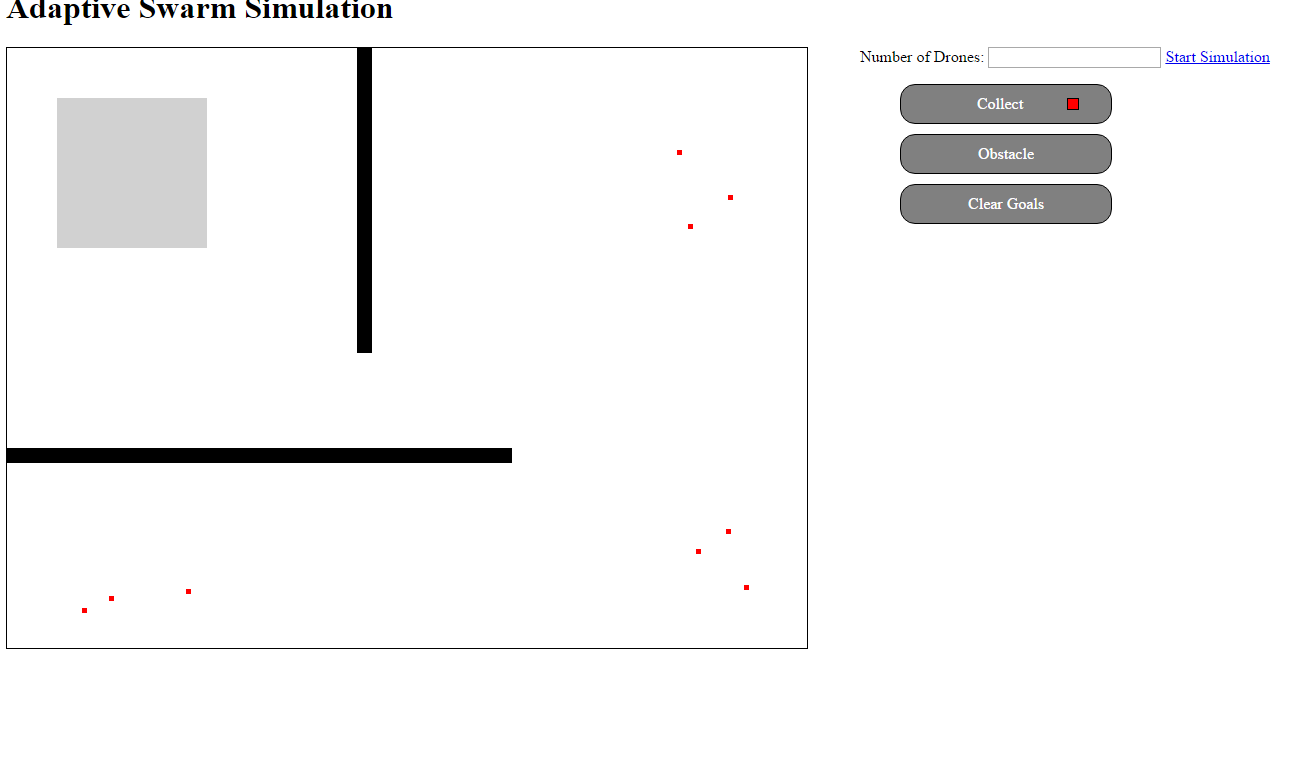
The individual parameters of each individual in the swarm are randomly chosen at the start of the simulation. The grey box represents the "deployment" zone of the drones. After running 20 trials of this experiment, I collected the following data which will be used to determine the performance of the adaptions I will be putting in place next:
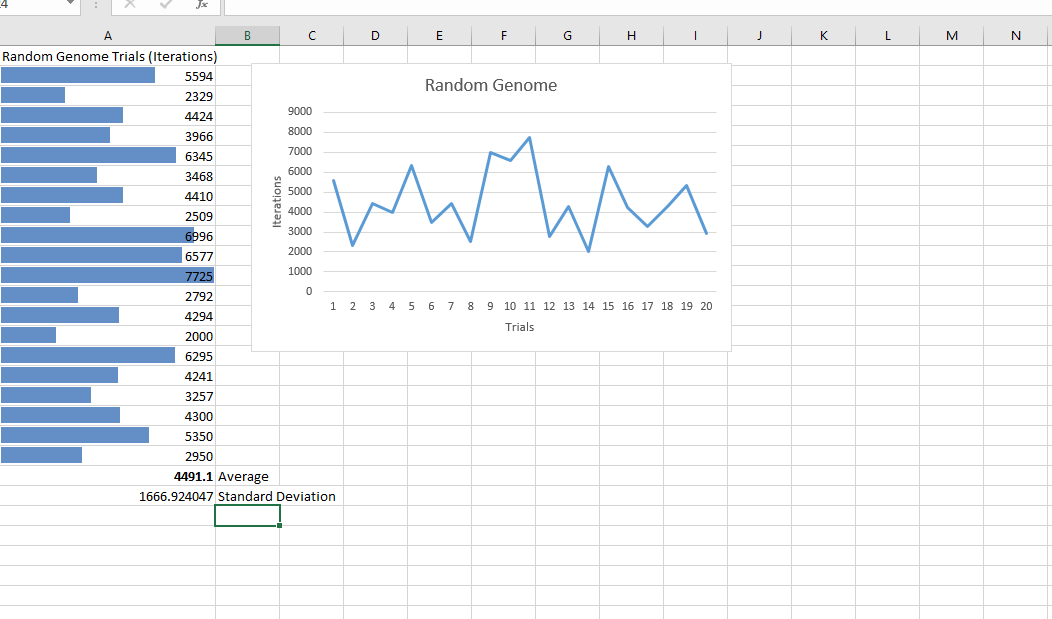
As one might expect from using random settings for the robots, the results are fairly random. A few observations are in order however regarding some patterns I noticed while running this trials:
- Drones that have small enough settings for their collision thresholds will sometimes "exploit" the simulation and move though walls. This is caused by me actually representing the walls as a series of circles in the simulation and depending on the thresholds to keep the machines "away" from them.
- Most Drone settings are pretty unhelpful. With the wander probabilities too high, the machines simply jitter around not doing much.
- Drones that were able to "follow" the walls where the most successful at getting to goals. I haven't pulled the settings this drones used (as I haven't built a way to get that information out of the simulation yet), but I suspect this behavior comes about as a balance between collision threshold and the turning radius.
Anyway, there isn't a lot I want to say about this data set yet, I am including it for completeness, and to provide a yard stick via which I can measure the more interesting approaches performance (or lack there of as the case may be).
Depending on the outcome of the of the adaption experiments, I may need to add or tweak the existing behaviors in the drones. Once I have found the "sweet" spot of simple behaviors and adaption I will add the final subumption diagram to the project.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.