 borazslo
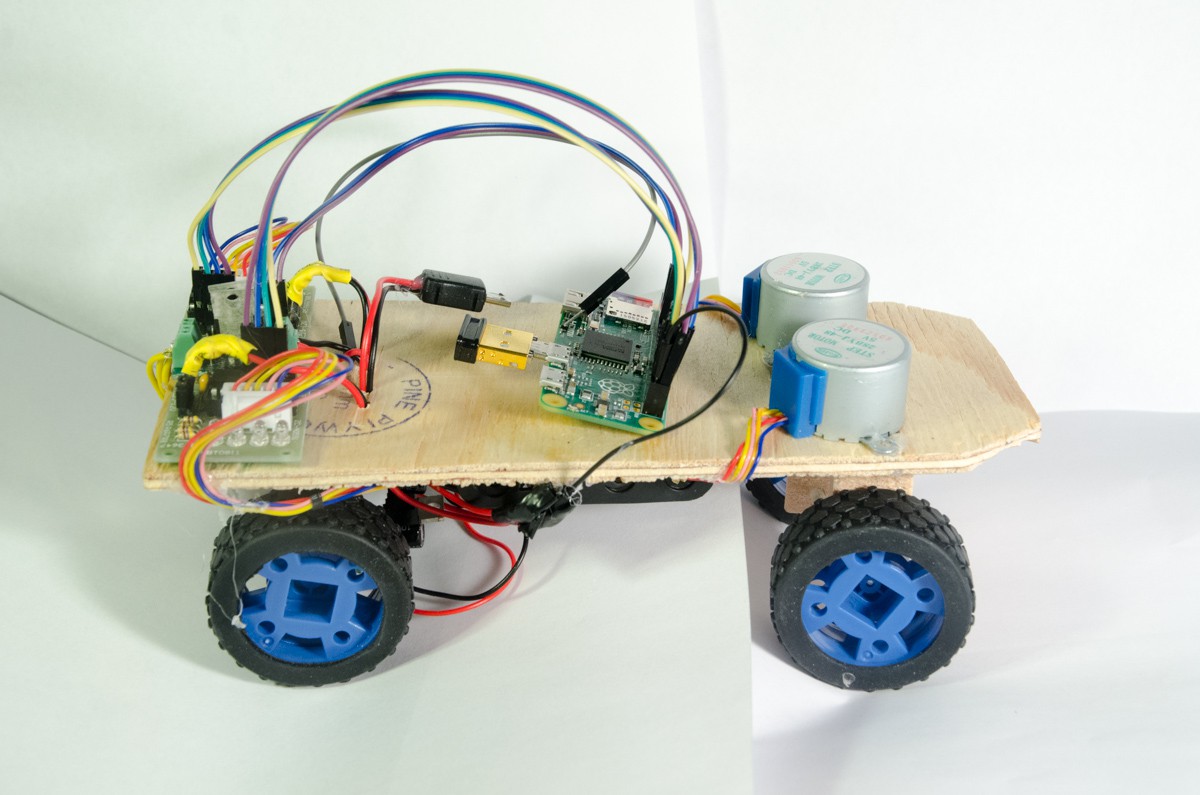
borazsloAs I mentioned regarding the RoboCar Zero v2, the stepper motor for steering was not strong enough. So I began to use my second stepper motor for steering. Now each motor turns one of the front wheels. It is not only better but also looks better.
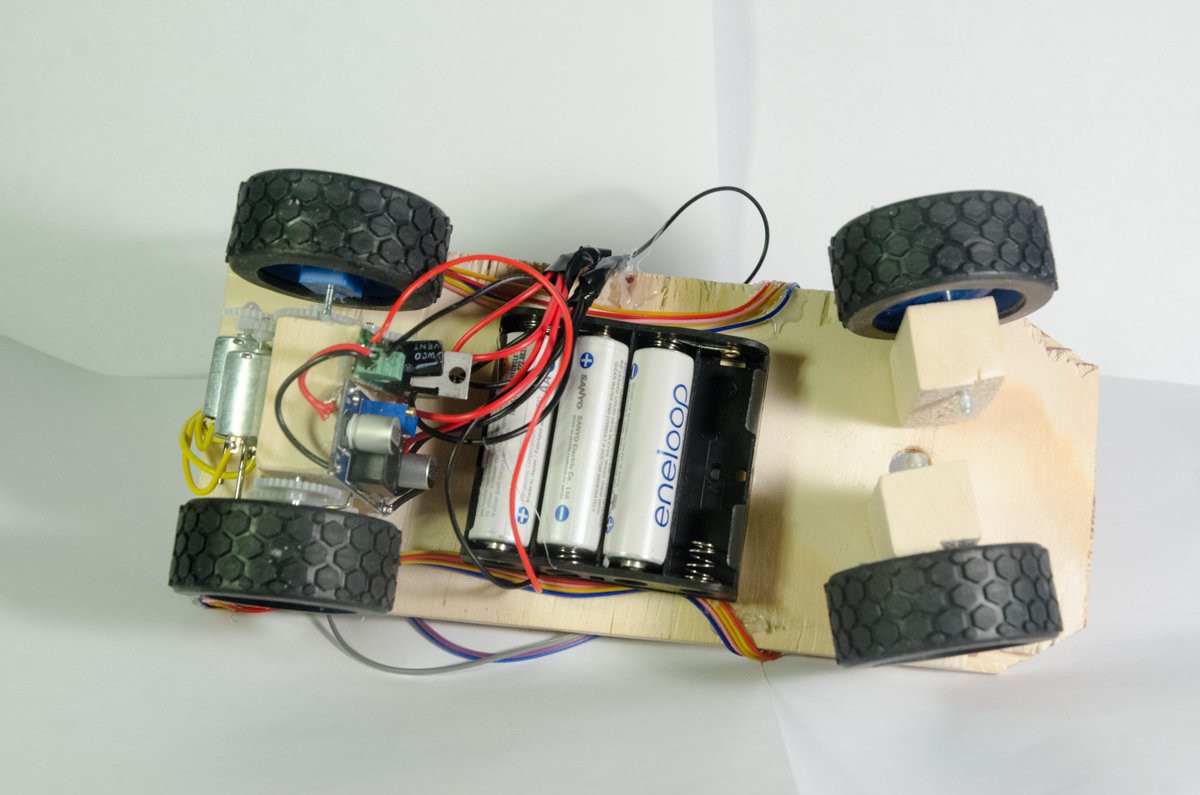
But there is a strong drawback of this steering system: the two wheels are not turning together. Stepper motors are precise, but when the tractions of the wheels are not exactly the same, the wheels can turn differently. So let's go back to the drawing table.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.