 AndresRengifo
AndresRengifo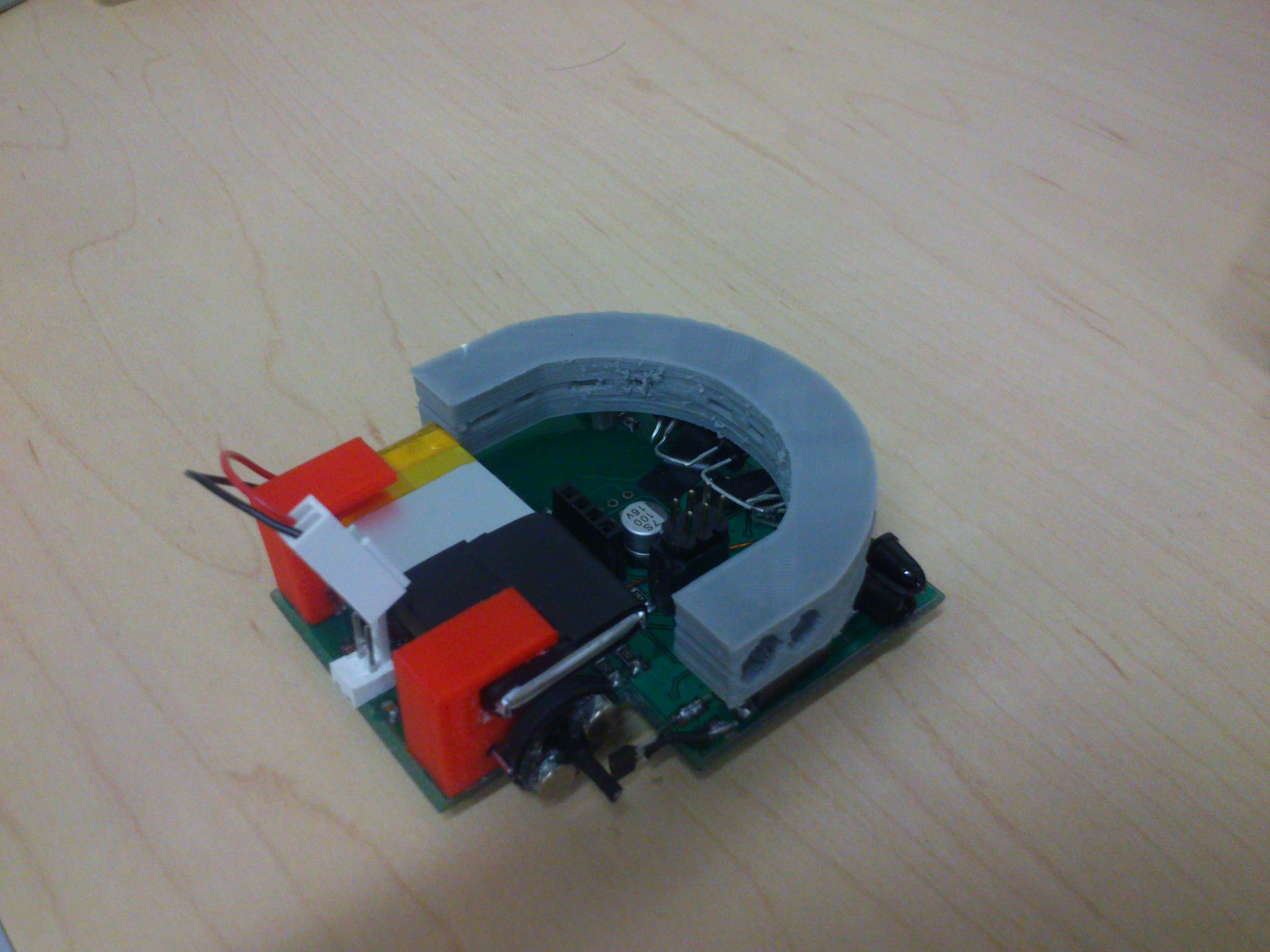
As you see, this prototype had tiny wheels that moved, by friction, with a micro vibration motor. The wheels also had magnets to perform dead reckoning using a hall sensor. However the slipping of the wheels result in inaccuracies in the dead reckoning system. Another problem with the mechanic system was that the power needed to overcome the wheel friction was to big and this prevented the speed control. Finally, minor differences between wheels and mechanical mounting produced a significant changes in the robot steering and make impossible an acceptable linear trayectory.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.