 E. N. Hering
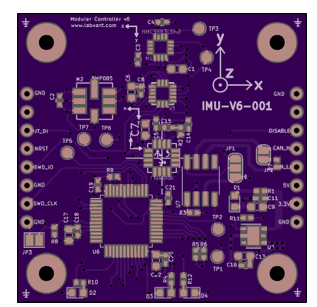
E. N. HeringI'm working on version 6 of the system modules. They are STM32 based and use CAN to talk to each other. There will be five modules: communication, servo, IMU, a blank MCU and a power supply one. Form factor has changed too. Now they have 4cm x 4cm.
This version solves mounting issues, makes the communication between modules much easier and even let you use them for other purposes by connecting them to other stuff via the widely used CAN interface.
Soon I'll post the link to OSH park and a Mouser BOM, so you can build yours at home too.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.