 E. N. Hering
E. N. HeringHi! I have good news!
After a long debugging session, today I could read the sensor data via UART and via Wifi. The data was produced in the AMGP sensor module and delivered via SPI to the COM communications module, where it was routed to my computer via UART and via WiFi. This is a major milestone in the system development. I took a screenshot of the serial communications and of the TELNET windows:
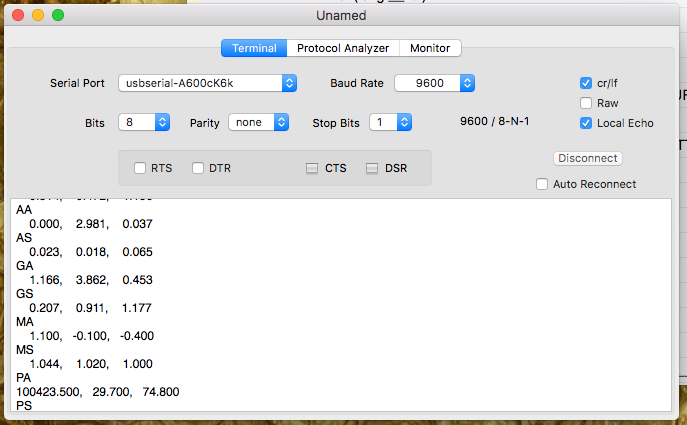
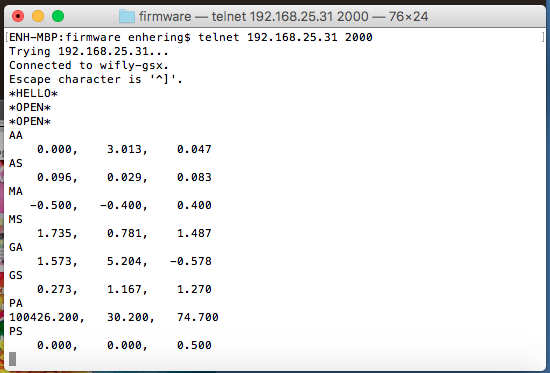
(AA = Accelerometer averaged data, AS = Accelerometer std dev data, same for magnetometer (M), gyroscope (G) and barometer (P), which delivers pressure, temperature and altitude instead of a three dimensional vector like the other sensors)
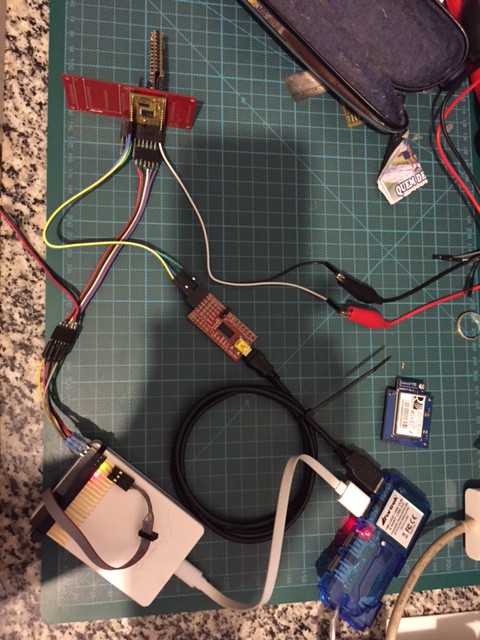
And here is the crazy setup to program and debug the modules:
I'd like to thank the people from #avr IRC channel on freenode servers for all the help in debugging the code running on the modules, specially carabia, Lambda_aurigae, specing, CapnJ, rue_house and all the others I forgot to mention because my memory does not work well.
I'll be back soon with more good news. Thanks a lot for your support!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.