 Thomas Suarez
Thomas SuarezSeptember 2014
Thomas has established fully custom electrical, mechanical, software and firmware prototypes using Raspberry Pi, Arduino, AVR, and 3D printed parts. He stays focused on the goal of super fast 3D printing.
January 2015
The ORB website has launched! -- http://orbprinter.com
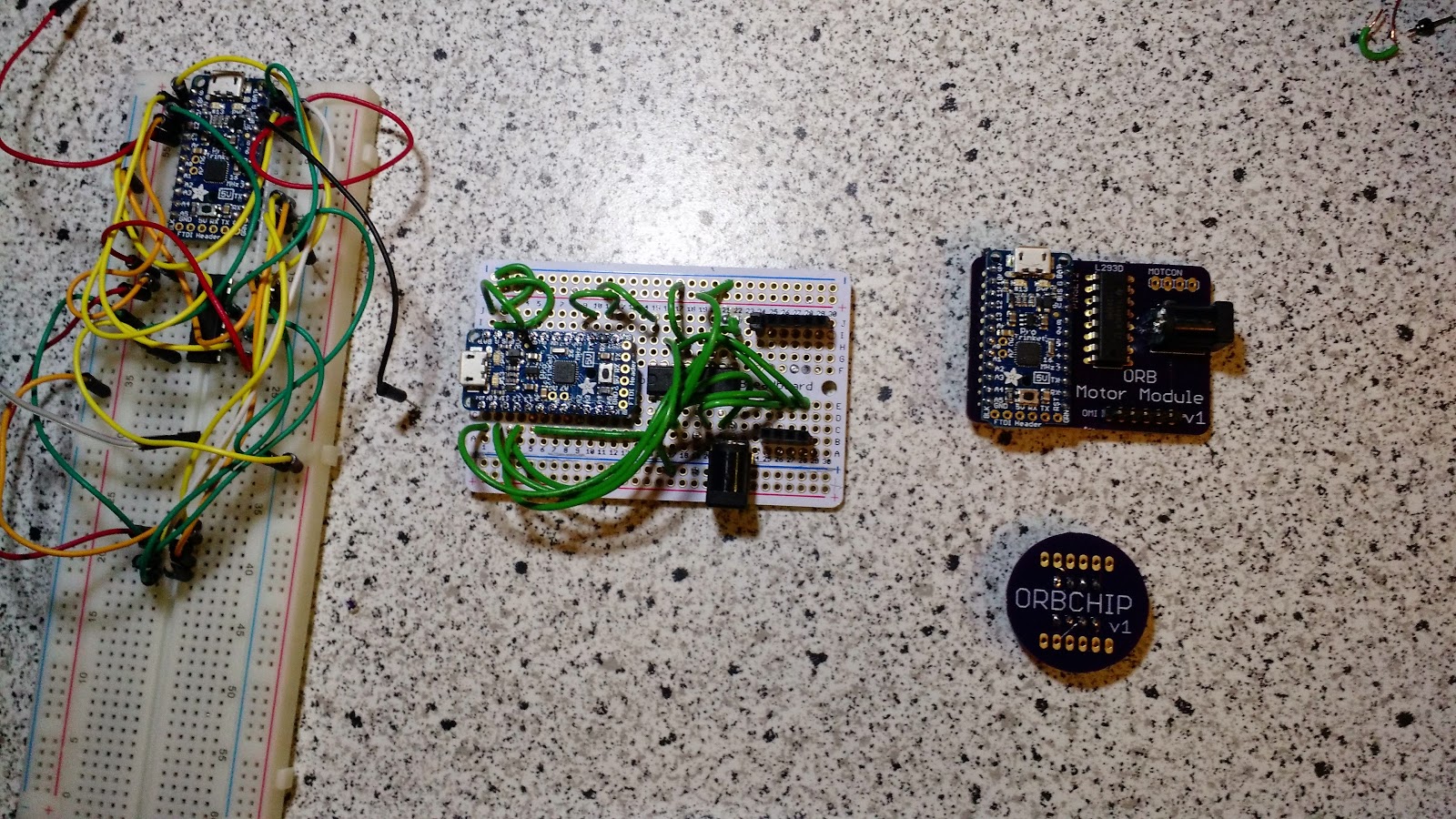
Introducing the PEASH Paradigm, Thomas has created independent modular components for each individual mechanical part of the printer. Each of the PEASH electronic components controls an associated motor and mechanical part: Platform, Extrude, Angle, Spin, Hotend. With the introduction of ORB Print Code, he also aims to simplify the print process for the maker and end user.
The next major focus of the ORB 3D Printer has been created: Modularity!
Realizing that today’s 3D printers are generally closed for innovation, from both hardware and software points of view, ORB aims to foster an ecosystem for modular 3D printing. By eliminating the need for extensive engineering experience to add to or change a 3D printer, he is determined to give every user all the tools they need, from simple, one material prints to complex, multi-material electronics. All on one machine.
The modification of 3D printers still remains limited to a select few of engineers due to the growing complexity of centralized CNC control. ORB Modularity solves this issue by designating every major mechanical/electrical component in the printer as an individual Module, these “Building Blocks” allow users to modify the printer, customizing its functionality. Modularity vastly reduces the risk of failure of the entire system by removing interdependencies and ‘sandboxing’ individual Modules from the rest of the system. ORB Modules (and therefore the entire printer) are built on Arduino, a strong global open-source microcontroller platform. This also means that anyone can prototype their own Modules for the ORB.
Throughout the year, Thomas prototyped many iterations of the ORB 3D Printer, updating components and designs to make them just right.
September 2015
Raymond Lo has joined the team to focus on mechanical engineering, working with Thomas to design the next phases of the ORB 3D Printer. This iteration introduces mechanical standardization and furthers the work on printer geometry and functionality. Each mechanical component is being overhauled and improved for reliability. Electrical components are being miniaturized and we are prototyping new methods for each PEASH module, determined to optimize each one for individual performance in the ORB 3D Printer.
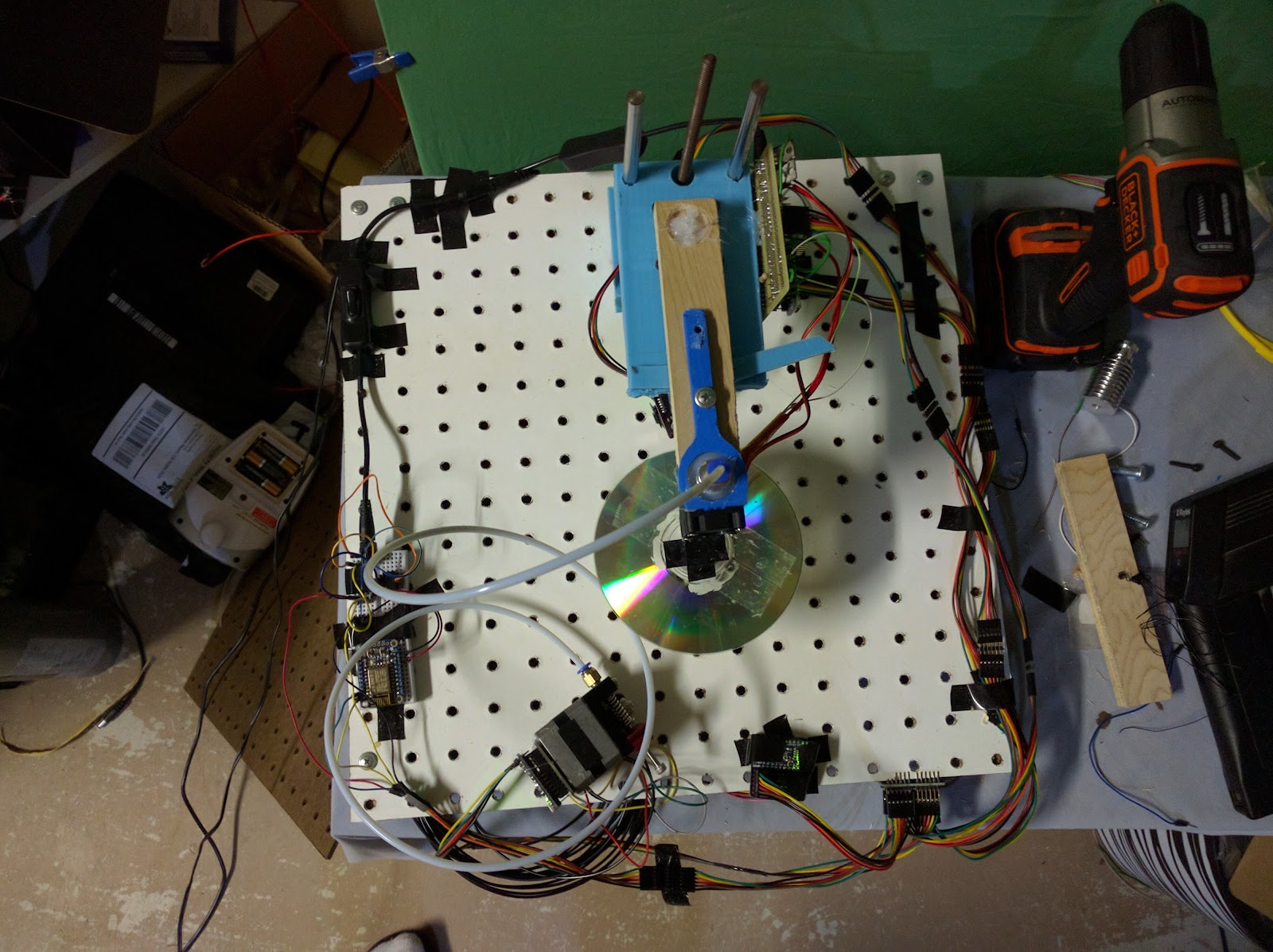
In our first study of ORB mechanics, we created what we fondly dubbed our “Pegboard” prototype, working to flesh out a functional architecture for modular components. Accomplished fairly quickly, we soon found the limitations of this model and dove into a radical overhaul. With Thomas visiting the Tribeca Film Festival soon to gather feedback on our prototype, we aimed at delivering a demo that would show the ORB as a stable, initial concept with room for development.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.