 Hacker House
Hacker HousePart 5:
Our Arduino needs to control several components (actuators, pumps, drive motor, position switch) in order for the bartender to work, but there aren't enough pins on the board to individually control each of these components. We decided that shift registers would probably be the best way to control multiple outputs with only a couple of pins on the Arduino. I spent some time explaining how shift registers work and where they would fit into our schematic.
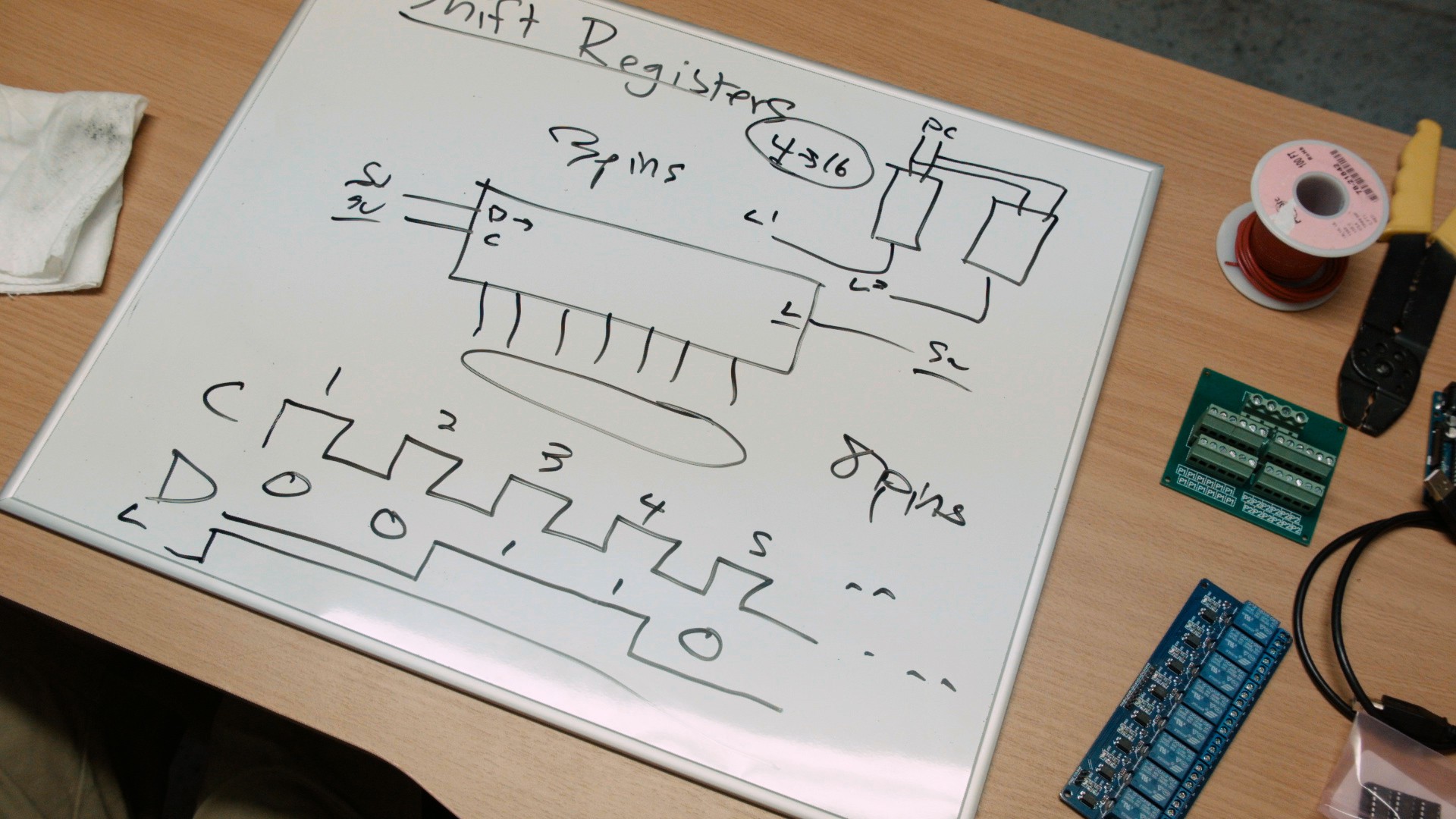
I also laid out all of my electronics and used the whiteboard to draw a mock diagram of how the components interface with each other.



Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.