 ThunderSqueak
ThunderSqueakI was thinking about the cost of linear actuators and how to accomplish the raise and lower action for PAL's body. There is a space between the end of the motors that can be used to let a threaded rod push and pull, and also swing a bit.... why not use that?
A quick search on amazon revealed this,

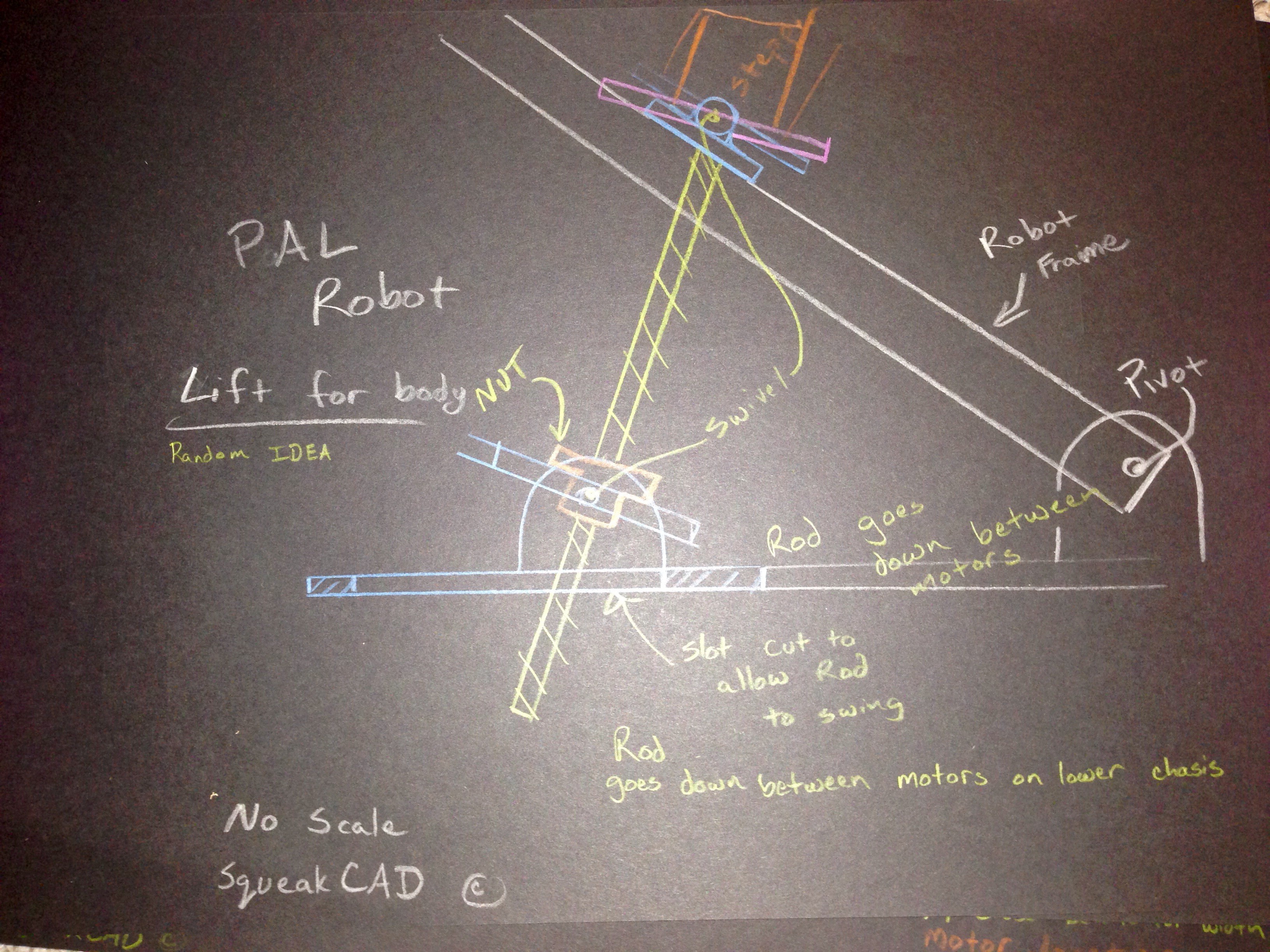
Since I have about 6 inches of clearance inside PAL, I can use a rod about that long. Next up, I did a quick 5 minute sketch to work out the mechanics. A set of pivots will be needed. But if placed correctly, PAL should be able to raise and lower to an almost completely flat state for faster travel and greater stability when needed. I will call this "Race Car Mode".
Nothing is to scale, as this is just a rough idea of what is happening.
Cheers!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I like the squeakCAD tag!
I bought a handful of those leadscrews from Amazon for a project a while back. They fit nicely inside 608ZZ bearings if you want to relieve the sideways forces on the shaft coupler.
Are you sure? yes | no
thanks for the comment. I will look into that :)
Are you sure? yes | no