 mlo
mloANSWER ME! Bonus points for getting the reference.
This Project Log comes in between 5/6/2014 to 5/8/2014. I feel that it is notable because the solution became very simple and elegant.
Problem: How should the Split-Flap Modules figure out their home position?
Potential Solutions:
-Optical Encoder: Extra hardware seemed expensive, but I didn't research the specifics. I believe 3D printers use some sort of Optical Encoder to find their 'Home' positin. Since I sourced a majority of my electronics from Adafruit, I continued on with the other solutions.
-Mechanical Limit Switch: In the beginning, I really thought this was the solution. It seemed simple and the switches themselves weren't very expensive. I especially enjoyed the satisfying click each one made.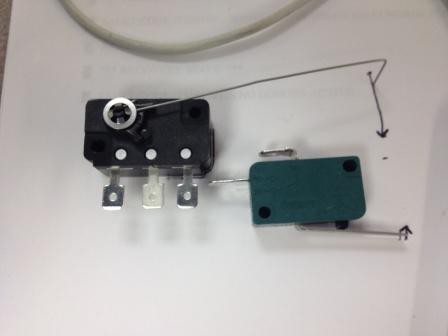
It turned out positioning them inside the box was extremely difficult. I couldn't reliably set them in the same position AND I couldn't guarantee that each module would be made to be the exact same.
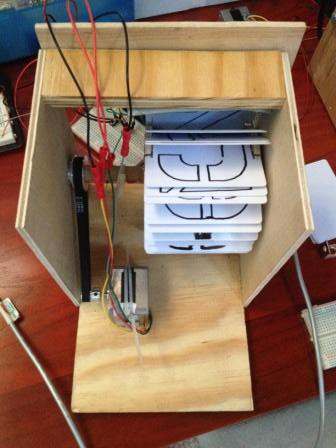
-Magnetic Contact Switch: In the same Adafruit order, I bough one Magnetic Contact Switch to play with. At $4.00 a piece, it was a bit more expensive than the Mechanical Switches. Placing it on the side wall of the module was also difficult, but Brandon (co-owner of the Inman Park Workshop), suggested using foam! Being in a workshop that specialized in making puppets, we were in no short supply of the wonderful pink stuff.
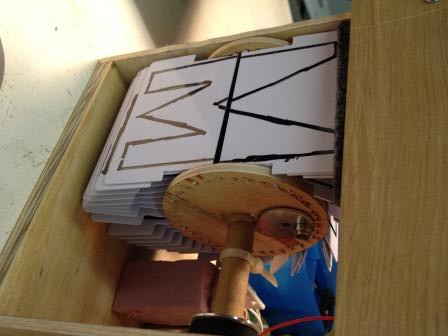 With the sensor now positioned, when the magnet passed by the switch it would 'make' a connection to ground. This 'ground' signal would let the Arduino know to stop the Stepper Motor and reset all it's positional data.
With the sensor now positioned, when the magnet passed by the switch it would 'make' a connection to ground. This 'ground' signal would let the Arduino know to stop the Stepper Motor and reset all it's positional data.
Rather than adjust the position of the Magnetic Sensor, we added a washer to give us the ability to calibrate the exact home position.
Simple enough eh? I'd love to hear your solutions!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Maybe the easiest way to keep track of the rotation could be to use your microswitch as the "tongue" that holds the flaps until just before they flip. That doesn't give you absolute position, but you'll know each time a letter goes by and can count to infer position. I do like the idea of having a way of indexing or homing the display. Maybe a 2nd switch that is only engaged by an extra tab off of the "first" flap. Just some thoughts!
Are you sure? yes | no