 Andrew Becker
Andrew BeckerIt took me much longer than I hoped but I have made the changes detailed below (sorry for the double post) and the arm now looks something like this (a bit more complete than shown):
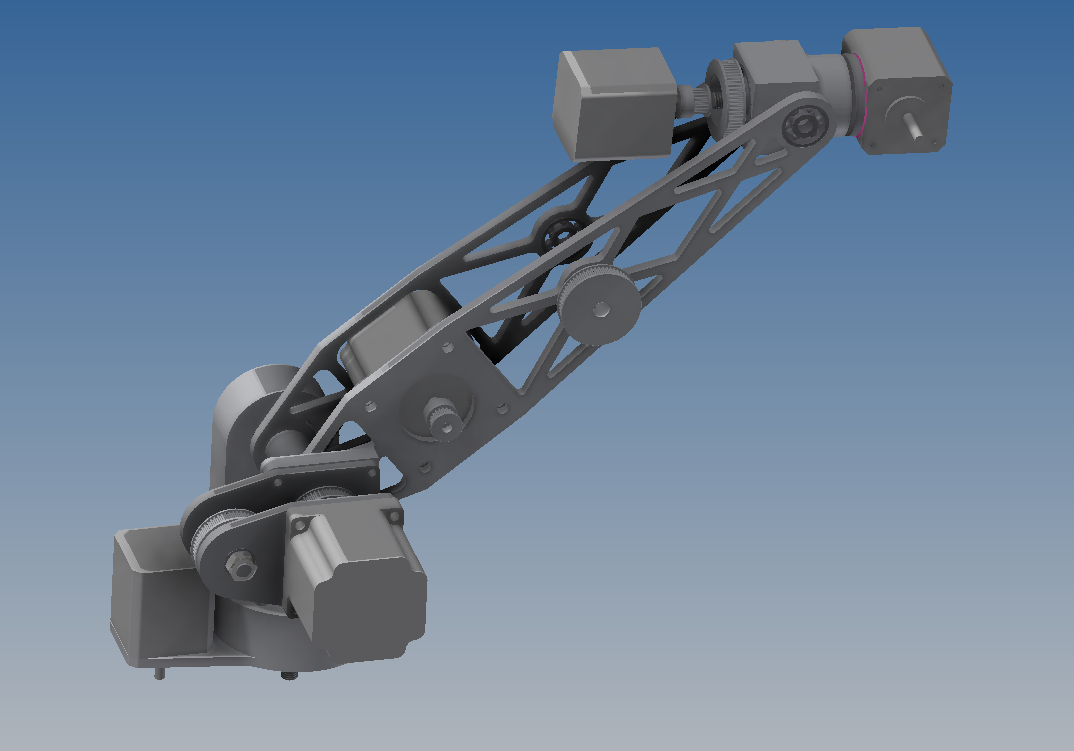
As you can see the rotation motor should counterbalance the 2nd arm somewhat however it will greatly increase the load on the primary joint. I have two options:
1) More ratio in the first gearbox - slower movement but easy to change
2) A second motor - Same speed but more complex to implement
Speed is a priority so I will probably go with the second one.
Despite a number of concepts that I eventually discarded I am glad I did the exercise as the layout concept can be extended to joints 5 & 6 too just with smaller motors. It's too late now to detail the hardware that I have purchased like I hoped but I am slowly adding it all to the BOM so check it out if you're interested. Nothing too fancy yet but once the arm is moving I'll start playing around with connected control.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.