 Bodo Hoenen
Bodo Hoenen
0%
0%
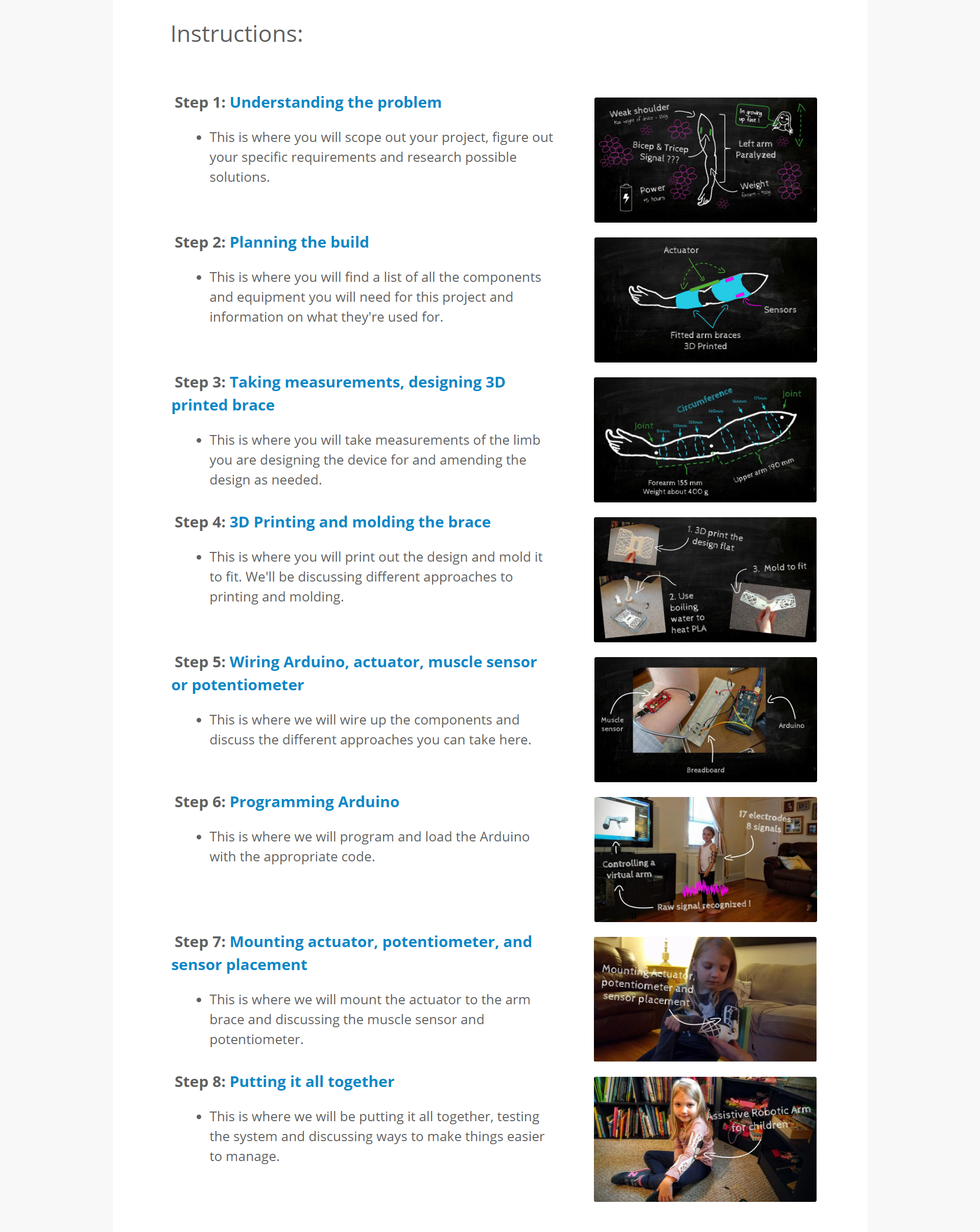
Building an Assistive Robotic Arm
We are building an assistive robotic arm for my daughter who recently became paralyzed in her left arm.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 ThunderSqueak
ThunderSqueak
 Nishant Agarwal
Nishant Agarwal
 Haddington Dynamics
Haddington Dynamics
 Jesús Tamez-Duque
Jesús Tamez-Duque
Really cool stuff.
Just some thoughts (feel free to ignore, particularly as I am not an expert), if you have problems with the myoelectric sensor, one alternative might be to explore acoustic myography. It may not work but something to think about if you hit a brick wall with the detection of muscle activation. I have played a little bit with it to see if I could detect activation https://hackaday.io/project/11501-acoustic-myographymechanomyography-experiments and it seems to have possibilities for stuff I am doing and there are a number of people who have projects out there in the public domain that are more advanced and refined that you could look at if interested.
Also wondering, if the signal from the bicep/tricep is difficult for her to generate reliably, have you thought about getting the signal from other muscles? It would involve her learning to activate those muscles to move the arm but may be easier to get detection of muscle activity.
Again - cool stuff and feel free to ignore my ideas if they are not relevant (and again I am not an expert in this stuff just a tinkerer) :)