 VPugliese323
VPugliese323As of today, our vision algorithm is able to identify most of the balls in the sample images of pool tables.
Here is a picture of the algorithm at work:
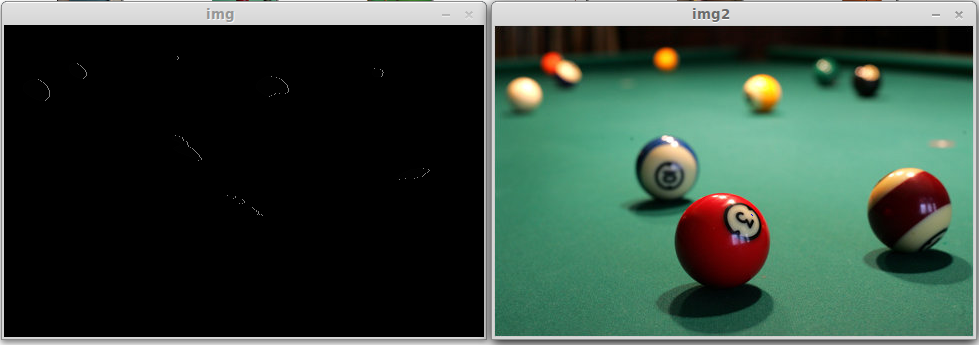
On the left is what the computer sees and on the right is the image it is processing. While the white squiggles it is producing are not circular, they do line up (in part or whole) with the location of balls on the table.
The construction of the physical robot was delayed because our local hardware store ran out of several parts that were needed to construct the drive-train. The individual responsible for building the hardware now has all of the parts he needs to build.
Yesterday, development began on the control software for the drive-train. It is currently in the debugging phase.
Construction on the electronic control system has been temporarily delayed as an integrated circuit that is needed for that system has just been ordered and has yet to be shipped from the factory. It is expected to arrive within the next week.
MOOS has been installed on two of the four computers that will be used in the control system for data processing.
Research is currently underway as to the optimal placement of ultrasonic rangefinders along the body of the robot. The rangefinders will be used for obstacle avoidance while in the pool hall (by obstacle we mean tables, human players, ect).
The head of the robot is currently under construction, the individual responsible for that has misplaced the camera that he will be mounting on the head and is waiting for a replacement to be delivered or the original to reappear.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.