 hylke44
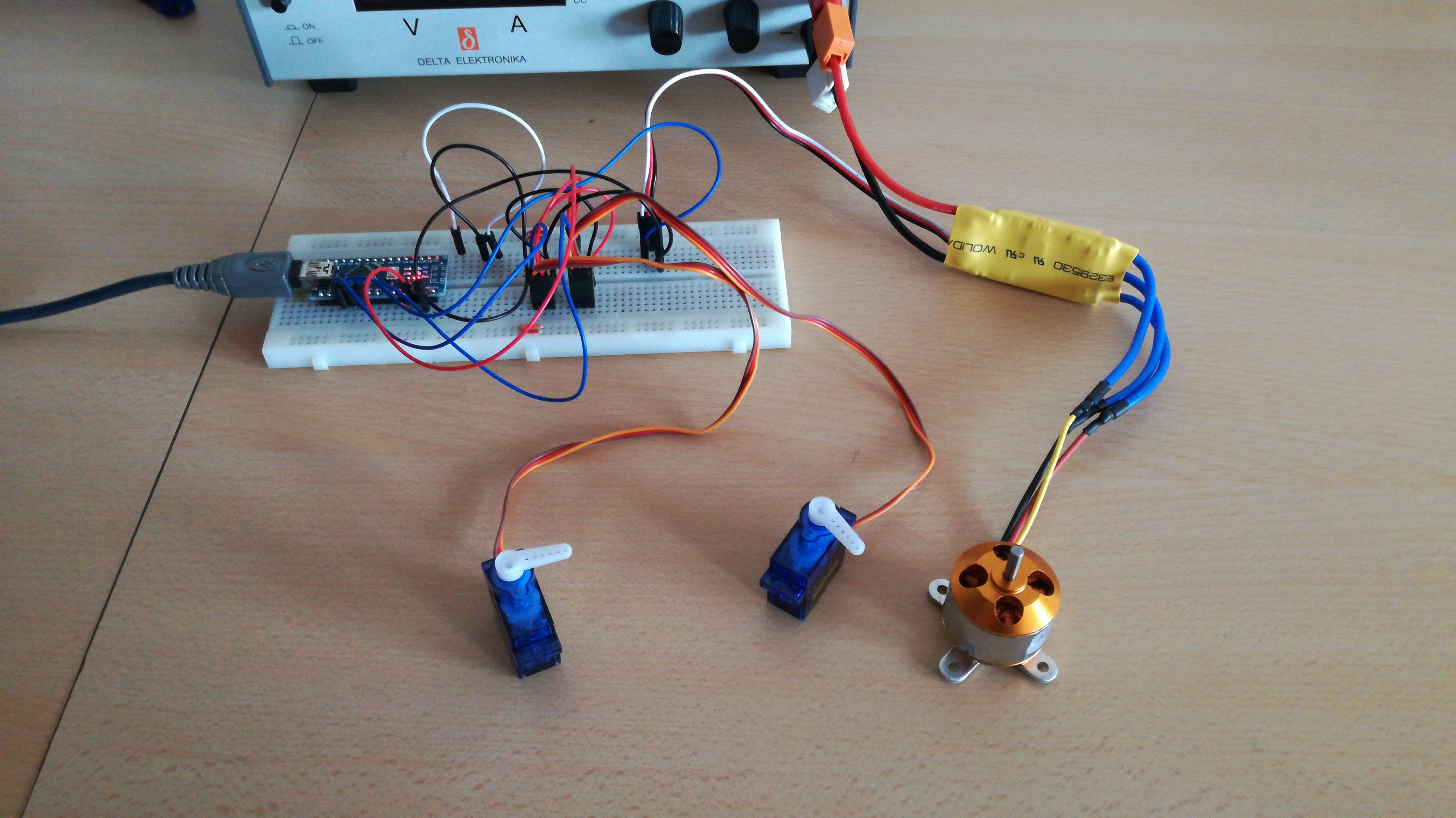
hylke44I have been doing some prototyping on the project. To start with a simple test setup to control two servos and a brushless motor with an Arduino. The Bluetooth communication is replaced by a simple serial connection. A computer is connected and acts as a transmitter, sending strings of data to the Arduino.
The protocol I used for now consists of two parts:
- One ascii character defining the channel of which the value is set. Possible characters are A, B and C as I only have three channels for now.
- Four ascii characters defining the new value of the channel. Possible values are 0000 to 1023. The future will tell if this range is correct choice.
The servo motors were immediately turning and following the direction of the data send by the computer. The brushless motor however was angry beeping at me. The signals for controlling a servo and an ESC should be the same so the next step was to swap the servo motor with the ESC. It did not improve anything. The servo was still turning happy and the brushless motor beeping angry.
After some debugging I found out that the signal input range of the ESC was not the full 0000 to 1023 but rather 0200 to 0900. I do not know if this is due to imprecise timing of the Arduino, the fact that the ESC was the cheapest one I could find or that it is something common for all ESCs. It is definitely something to keep in mind during future developing and needs some more research.
After changing the test code on the computer so other values are send the brushless motor also started to turn. The next step is to add a Bluetooth module and replace the USB serial connection with Bluetooth.I made videos of the whole setup working including the angry beeping so that will be added soon.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.