 Rowan Ferrabee
Rowan FerrabeeOnce a working finger prototype was developed, we began considering how the four fingers could come together into a fully functioning hand assembly.
The goal of the remainder of the hand is simply to transfer force from the linear actuator at the wrist to the fingers. Firstly, a support plate had to be designed which would rest on the back of the hand and support the force transfer system.
Since there would be no one surface that would fit every user's hand, the back-of-hand plate was segmented into four components in a way that mimics the human palm's four metacarpal bones.
Springs were added to the inside of four force transfer rods to allow for movement of the fingers even after one finger has completed its movement.
Finally, a slot to translate the force from the linear actuator into each of the rods was implemented.
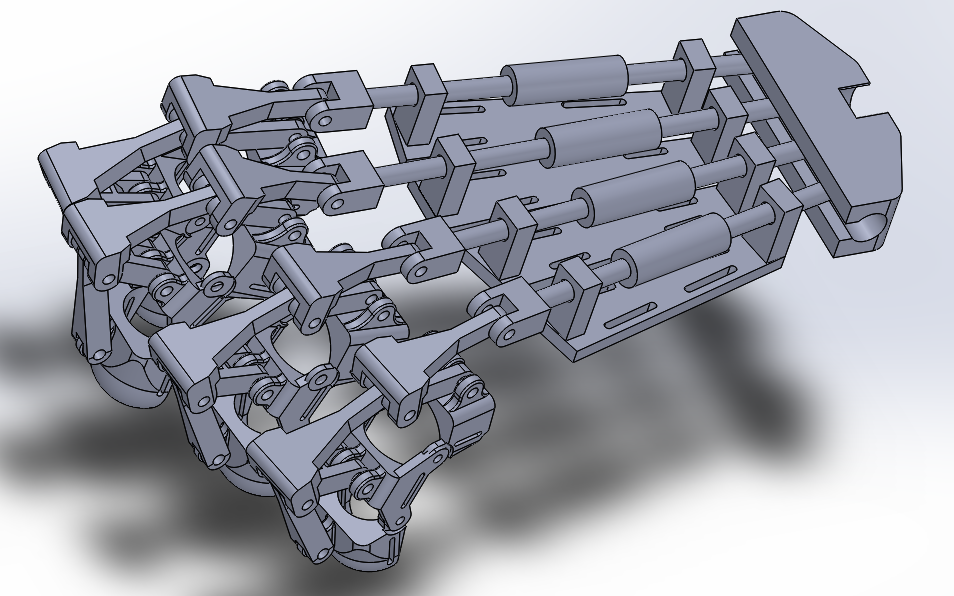
The whole system was designed and put into one big assembly that looks like this:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.