 Nelson Phillips
Nelson PhillipsGaining the most mechanical function out of the finger required the silicone casts for the actuators to be push to the limits of my current resources. Currently these include a 3D printer and your basic two part silicone. The major problem has been getting, the perennial casters problem, bubbles in the otherwise justifiable 1mm wall thickness. This meant multiple casts of the same actuator and sometimes a repair. Finally, there is the necessary appendages to form a grip.
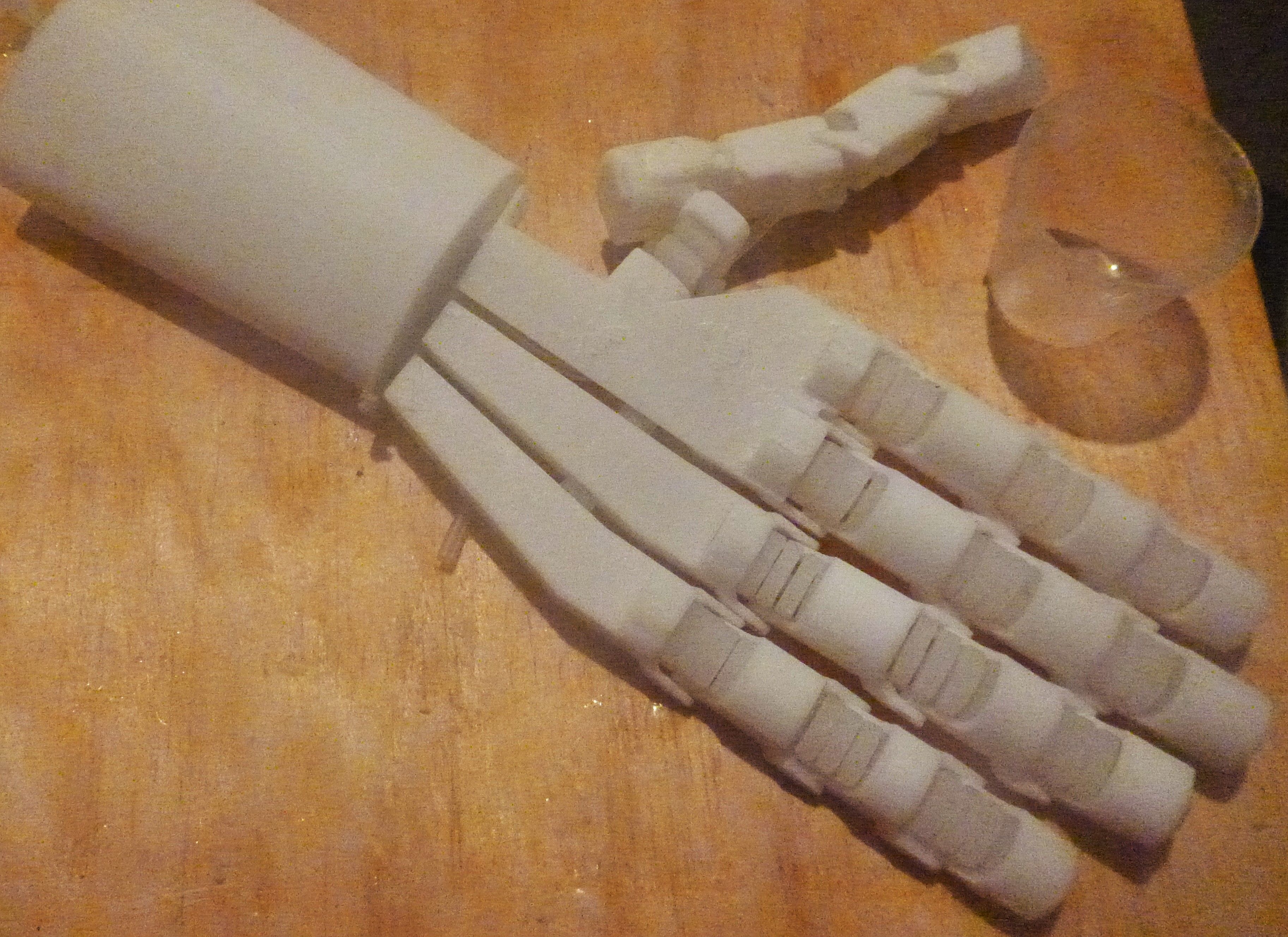
As it is a soft (robotic) hand it is compliant with the environment, which includes gravity. The picture below is a picture of it in a "relaxed" state. When a vacuum is applied the fingers stiffen even bend back on itself, almost what some can do and have a concave back.

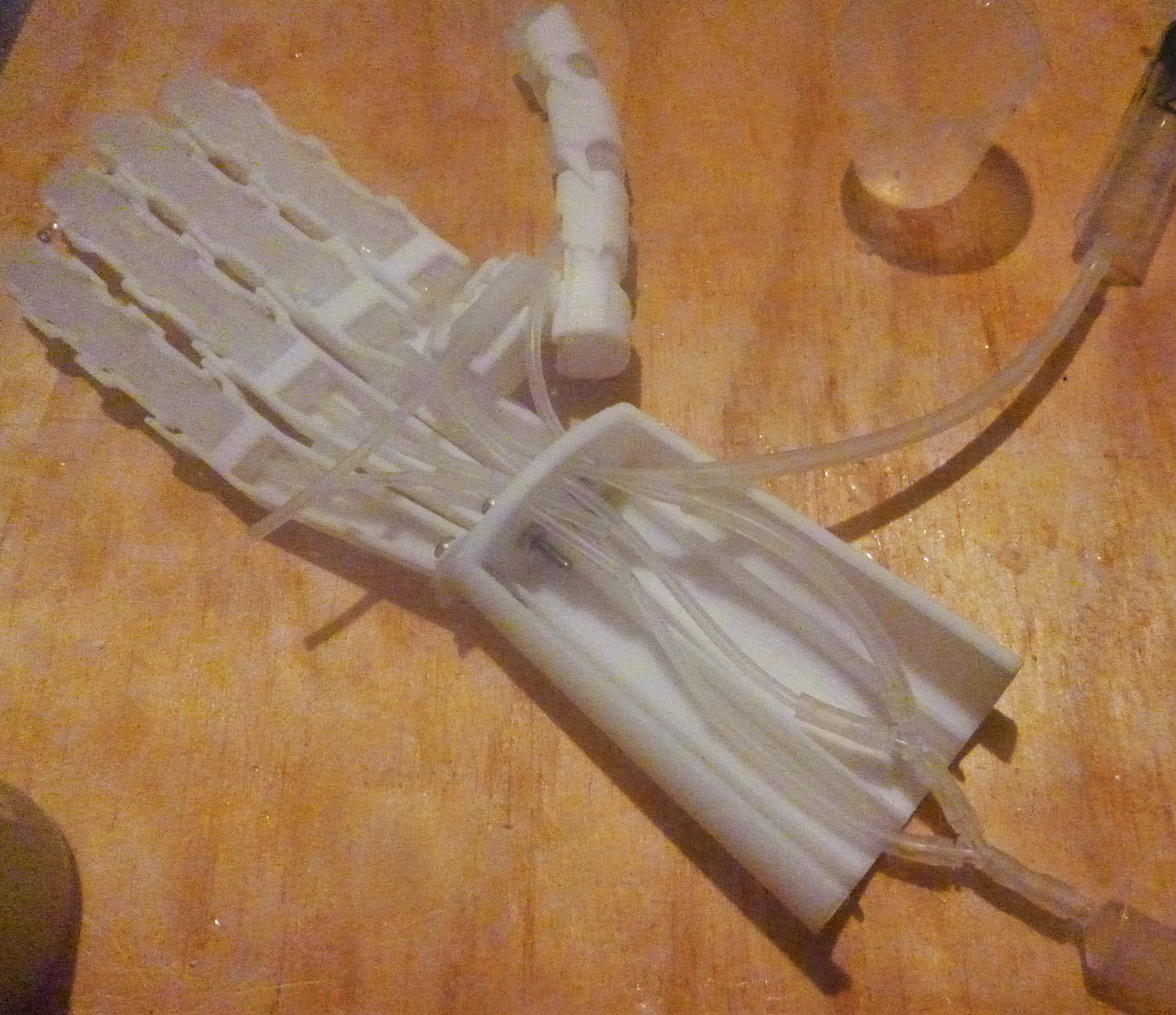
Before using electronics, a pneumatic pump and values to active the hand was tested to see if it works first and then the effectiveness. However, the size of the syringe the local chemist sells is not really capable of activate three fingers to illustrate a full/partial grip, but good enough for a basic look. So the following documents the basic functions of the mechanics of the hand. More time spent maybe justifiable to create better videos, but the emphasis has been on the build making the projects assumption physically successful.
Finally this is a view of the thumb mechanism, which is currently got a 3D printed insert for a little bit of stability and is not activate to the pressure required to achieve full function, but I think it give the idea.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.