 Nelson Phillips
Nelson PhillipsThe initial software and hardware for the control of the hand has been done. It basically doesn't blow the fingers up. A calibration test was done to understand the readings of the sensor to activate a comfortable amount of pressure in the actuators. Then a basic control sketch was written and tested with the intention of this to be the basis for a more complex control regime.
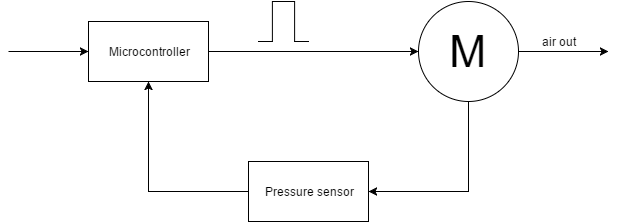
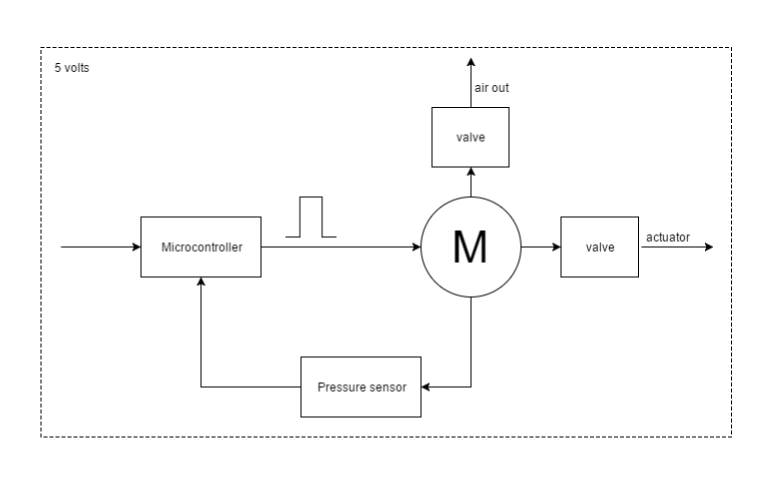
The function diagram represents the components with the valve in open loop and the sensor in closed loop. Using pwm to control the motor pump will enable the feedback sensor to proportionally change the output of the motor. There probably not a necessity to implement a full PID control and currently just the P will do, but the possibility is there for the future.
The whole system runs off a 5 volt power supply, as shown in the video this is definitely enough and will probably need to be carefully regulated so as to not blow a finger.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.