 Mike Rigsby
Mike RigsbyToday . . . the robot can find the object, pick it up, return home and reset for the next run.
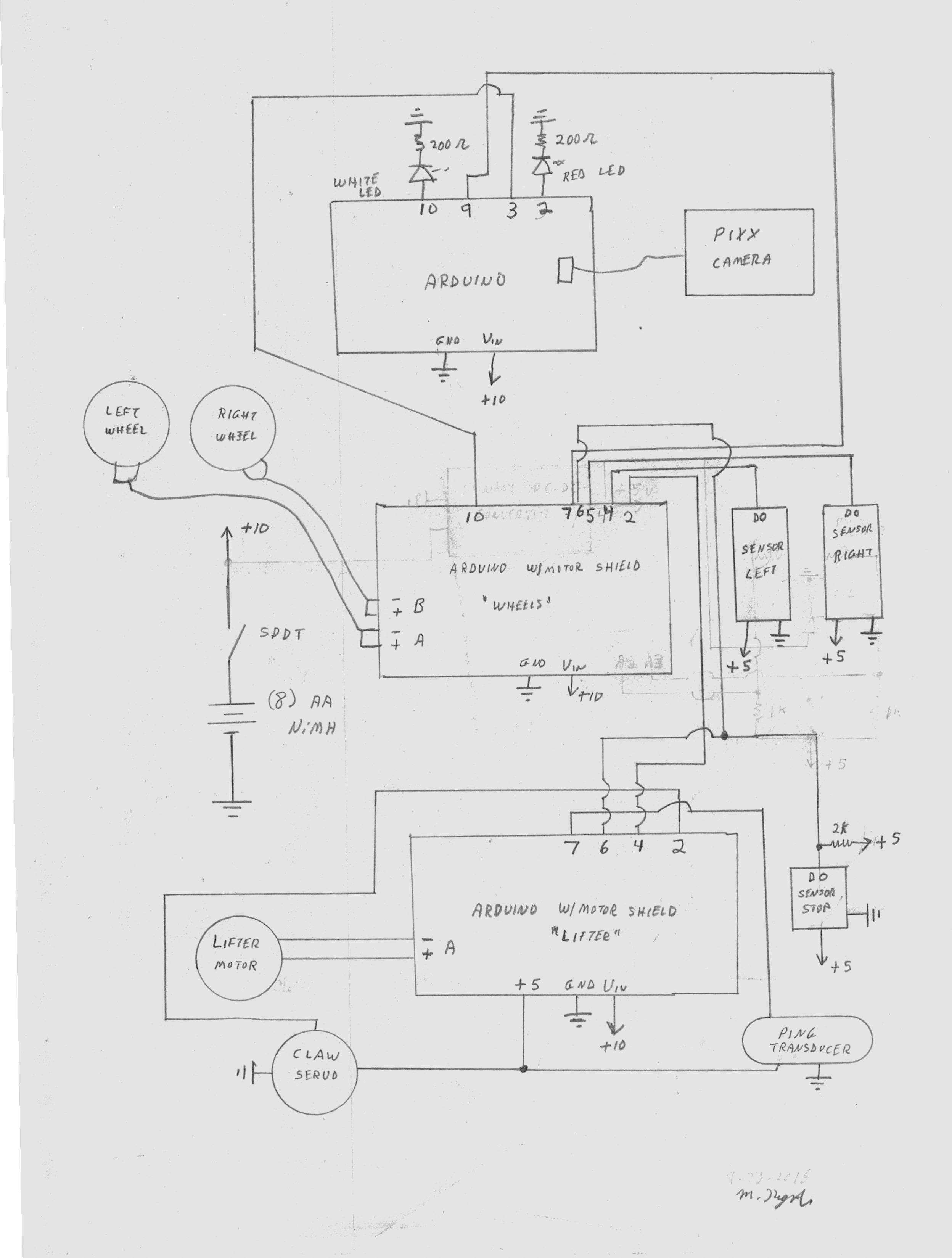
An infrared sensor is used to detect the home location and sketch changes (documented on this site) modify the controls to make the robot perform its task. The latest schematic is below:
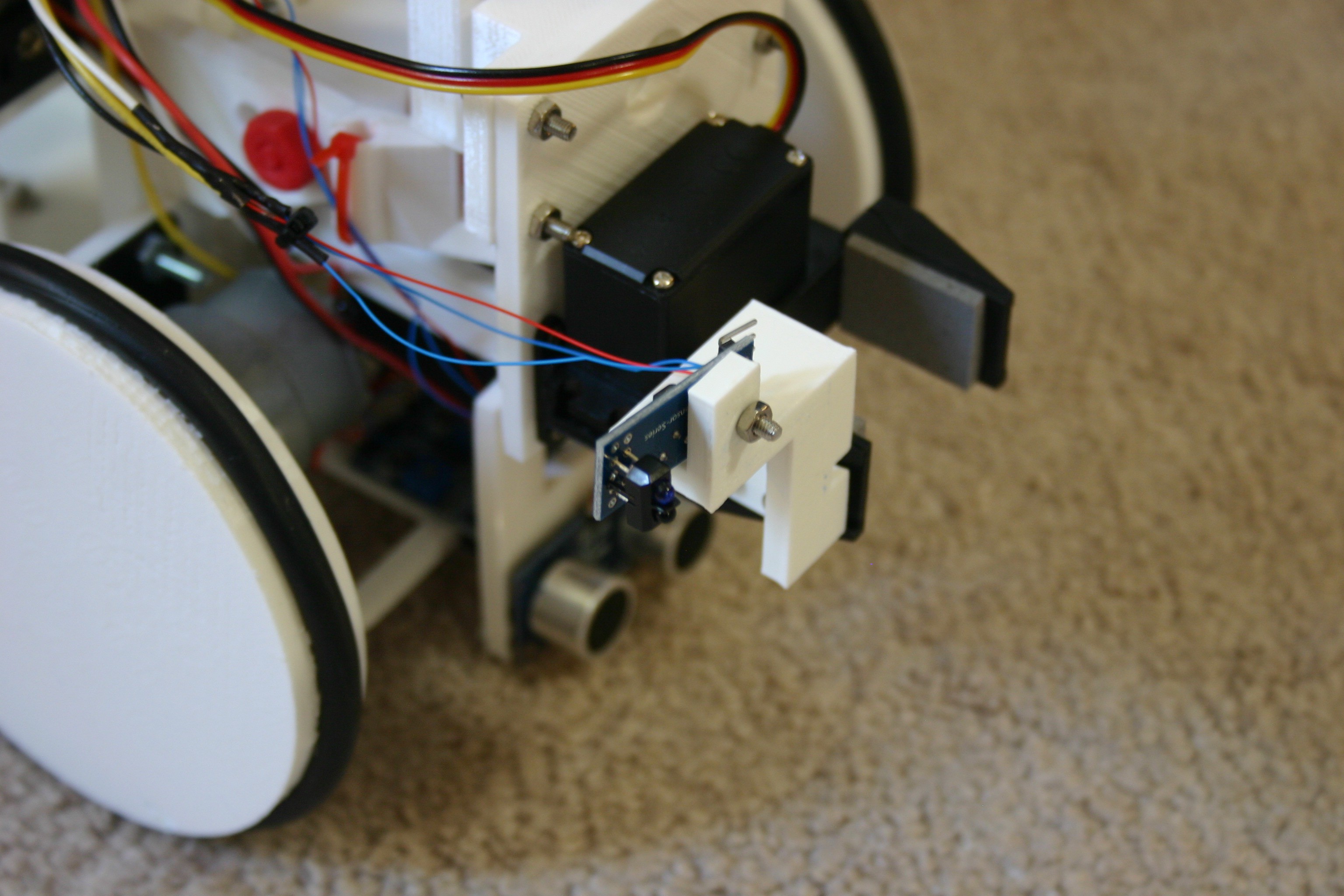
The "stop" sensor bracket (3d design and print files on this site) is secured to the claw using 3mm screws as shown below:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.