 M. Bindhammer
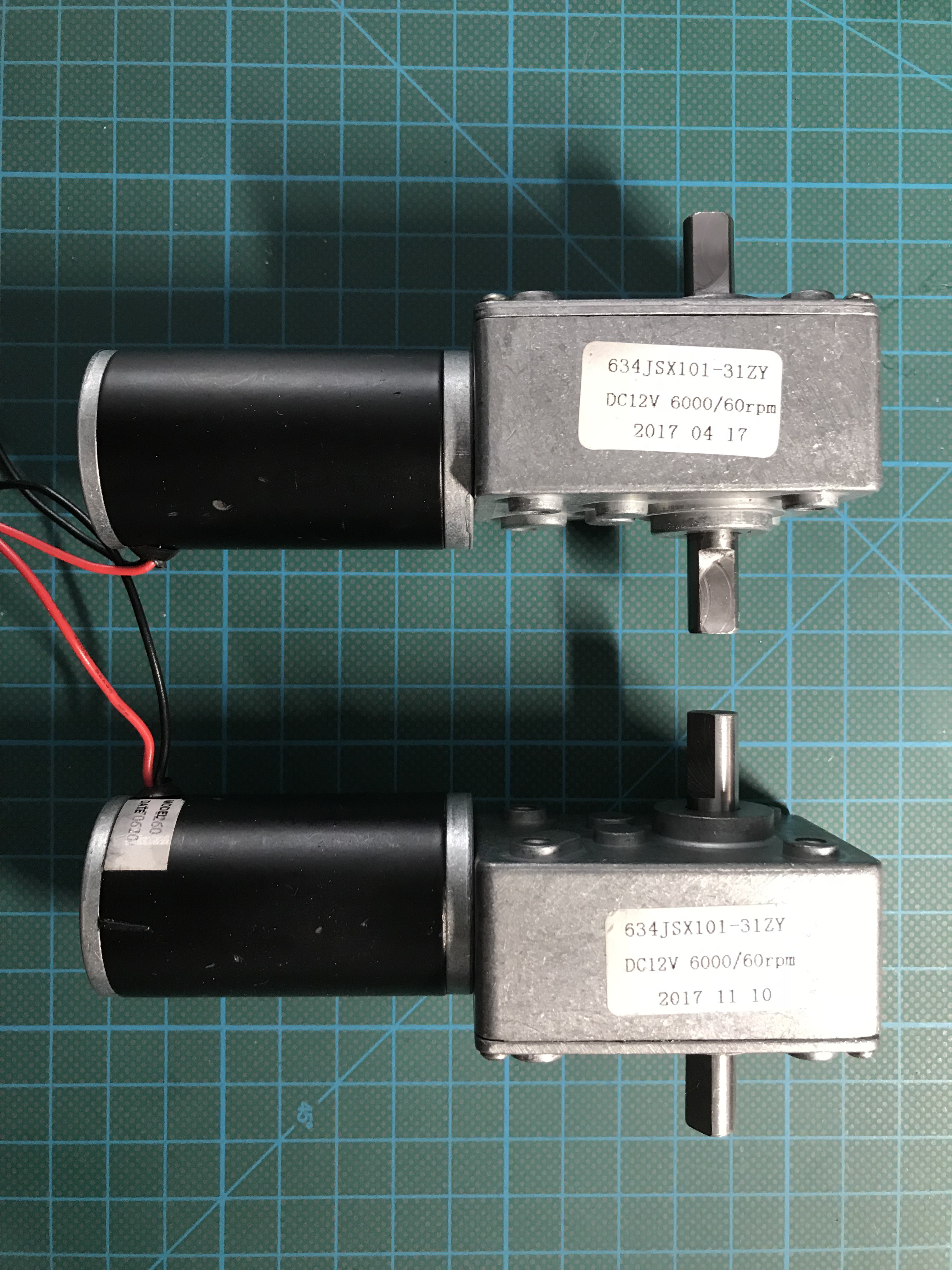
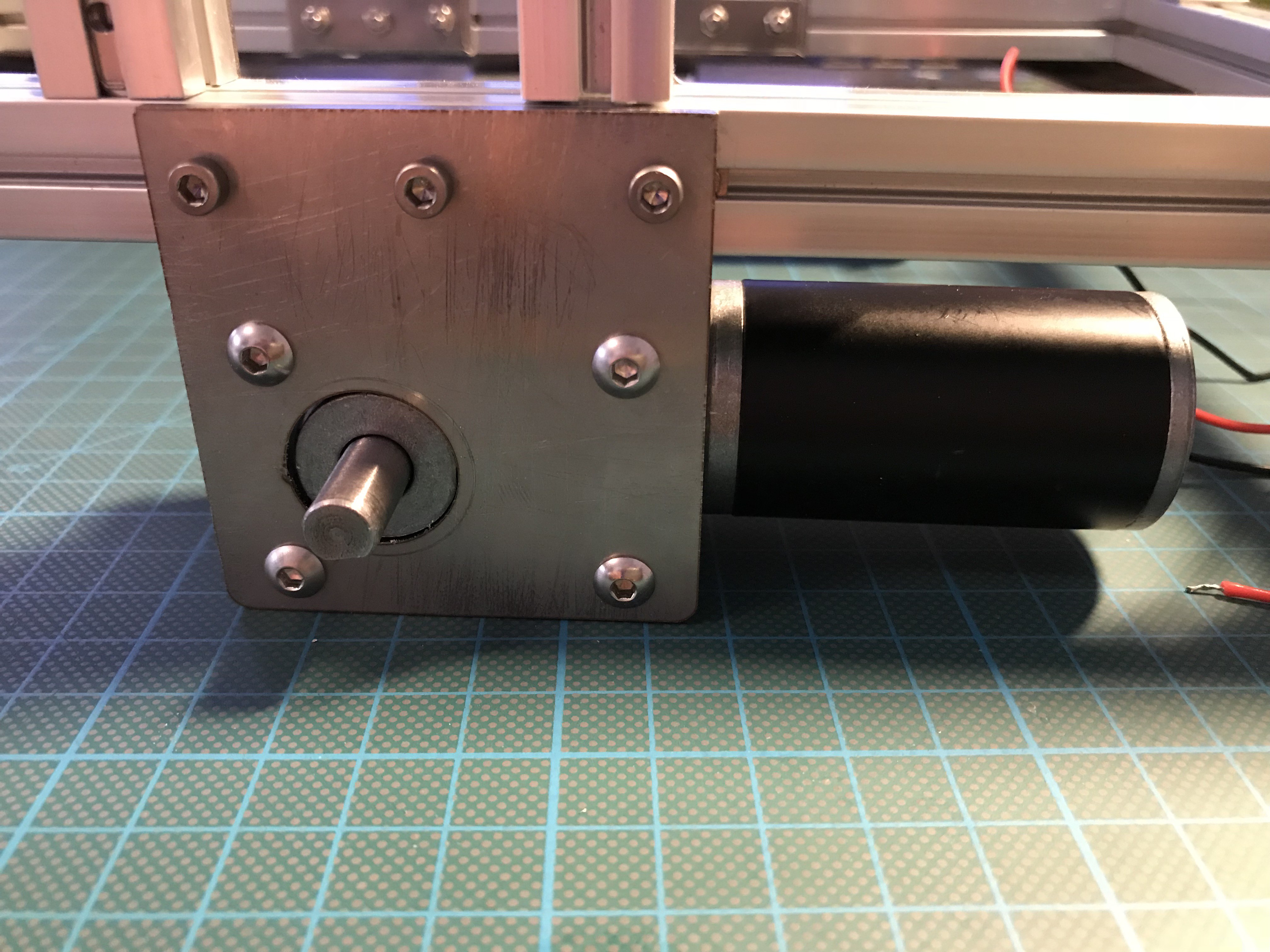
M. BindhammerI will use these angular geared motors to propel the robot:
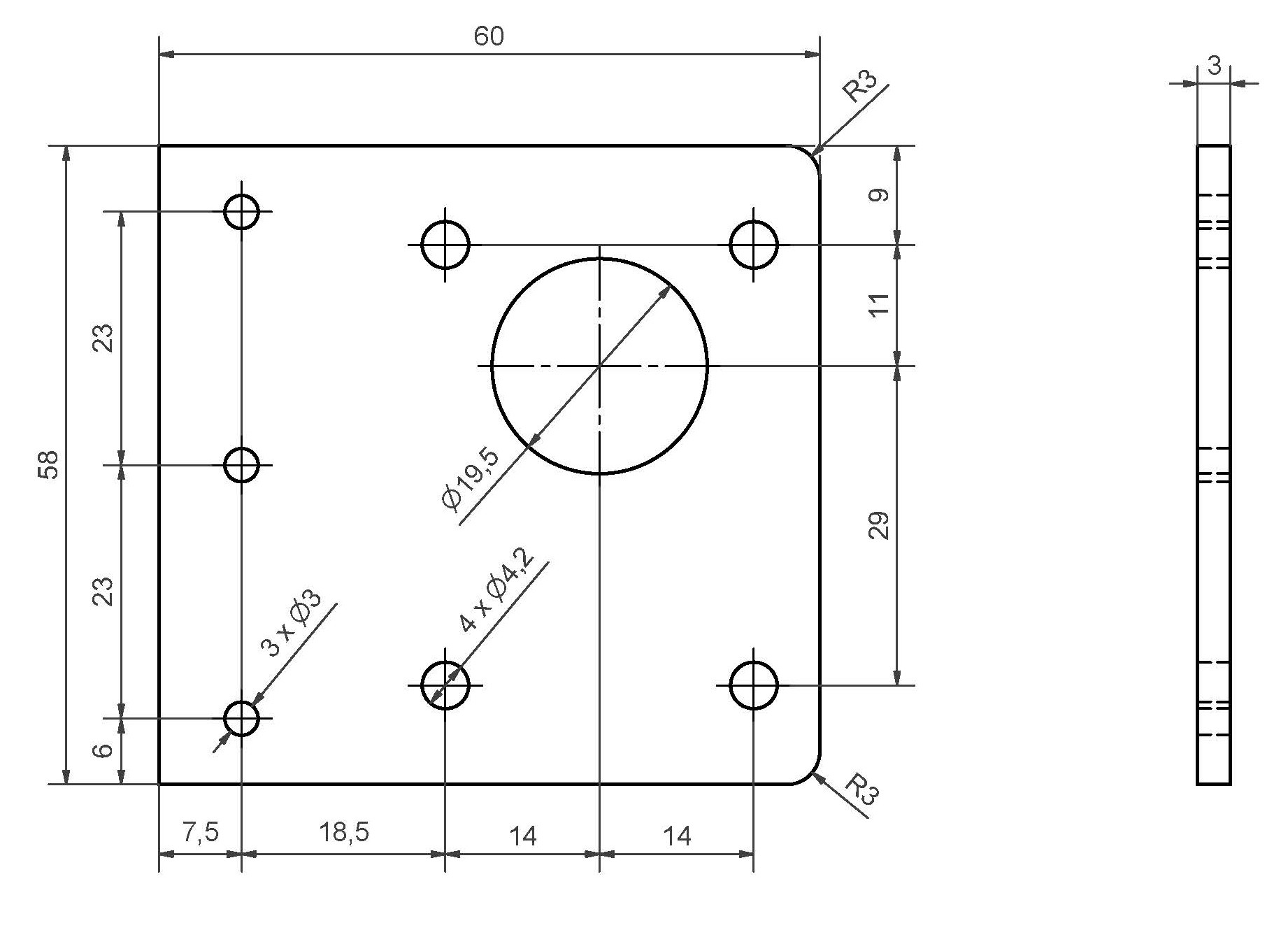
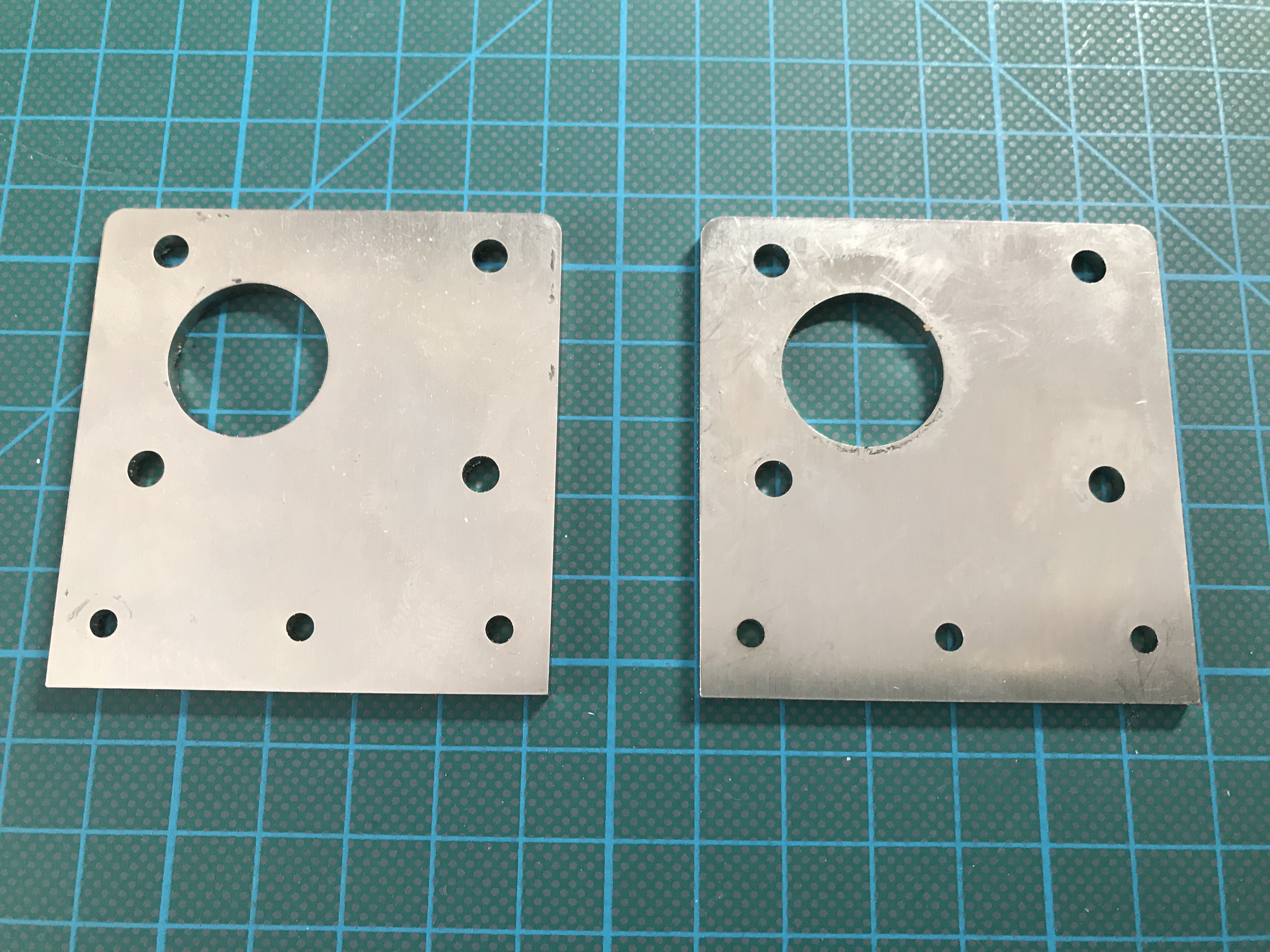
I designed according mounting plates to attach the motor to the 15 x 15 mm MakerBeam T-nut profiles and laser cut it from 3 mm stainless steel plates. The DFX file will be provided later in the file section.
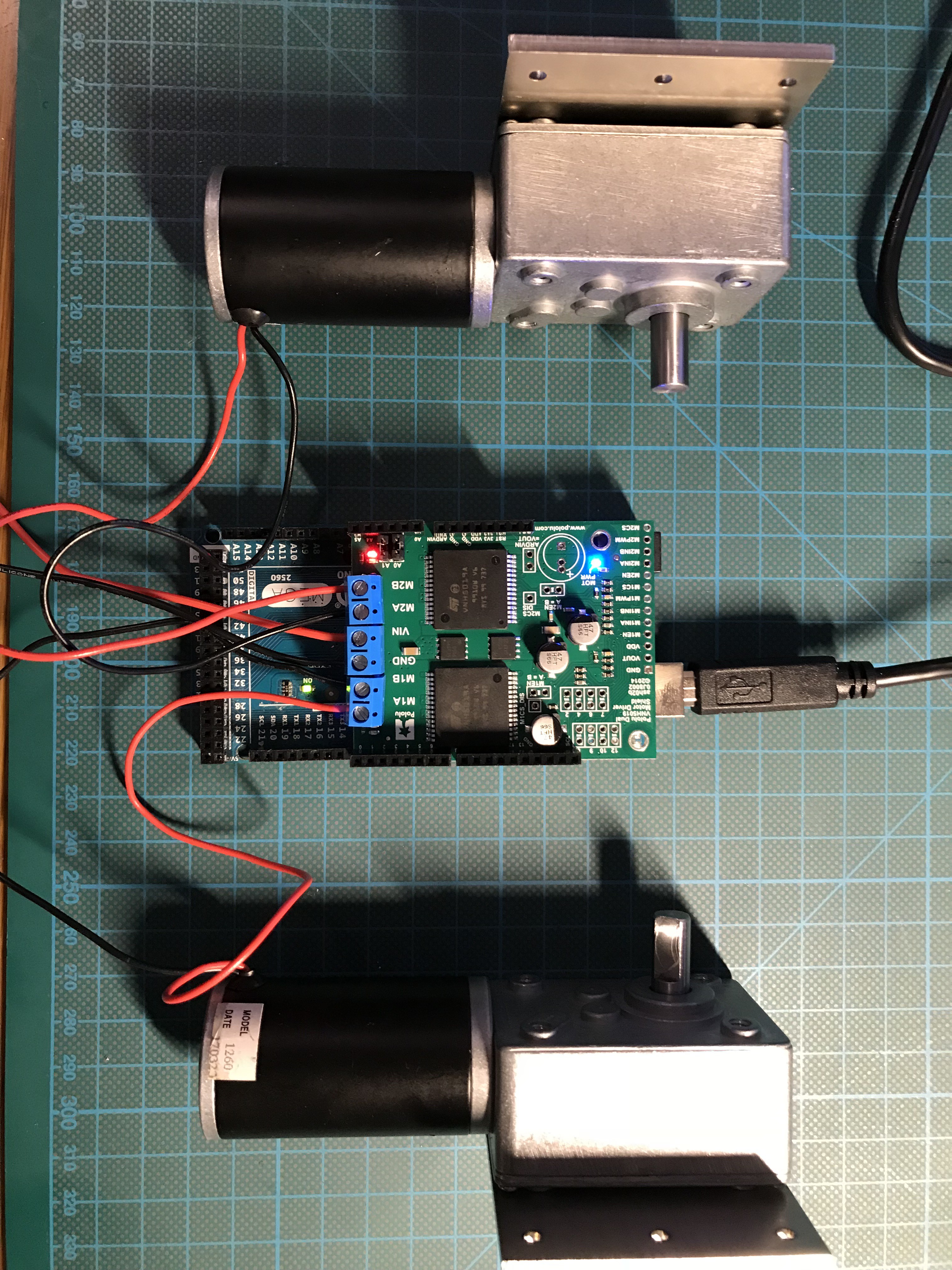
Steel plates attached to the motors and tested by a Pololu Dual VNH5019 Motor Driver Shield.
 Beefy aluminum wheel, CNC'd by a colleague in his workshop. Heavy, but this will help to keep the center of gravity nearby the ground, because the robot is very tall. Tire is a 10 mm dia O-ring. Next to it an off-the-shelf wheel hub for a 8 mm motor axis. The bore hole in the center of the wheel is there to position wheel and hub perfectly before fixing it by six M5 screws.
Beefy aluminum wheel, CNC'd by a colleague in his workshop. Heavy, but this will help to keep the center of gravity nearby the ground, because the robot is very tall. Tire is a 10 mm dia O-ring. Next to it an off-the-shelf wheel hub for a 8 mm motor axis. The bore hole in the center of the wheel is there to position wheel and hub perfectly before fixing it by six M5 screws.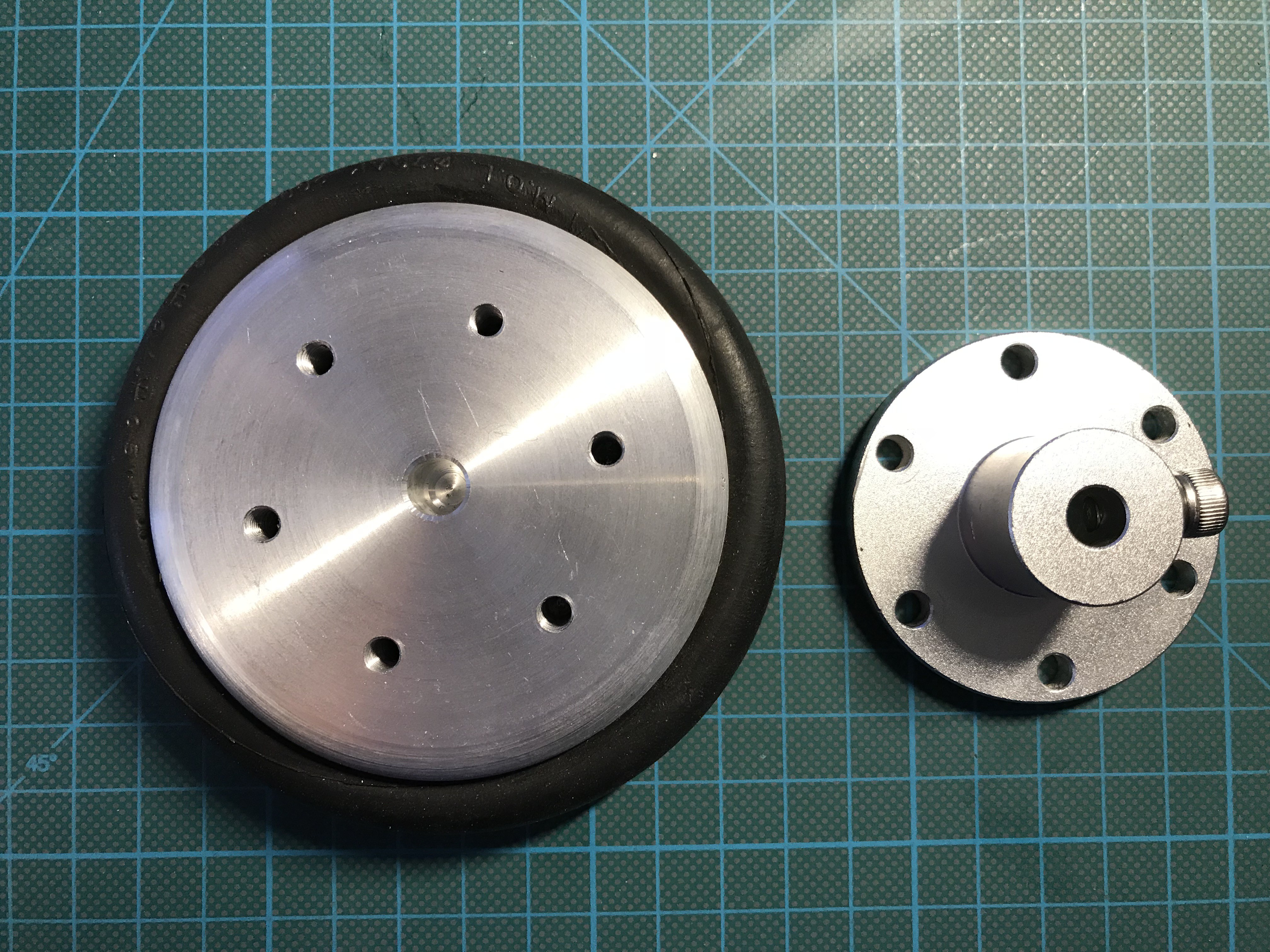
Motors attached to base.
 Wheels attached to the motors:
Wheels attached to the motors:

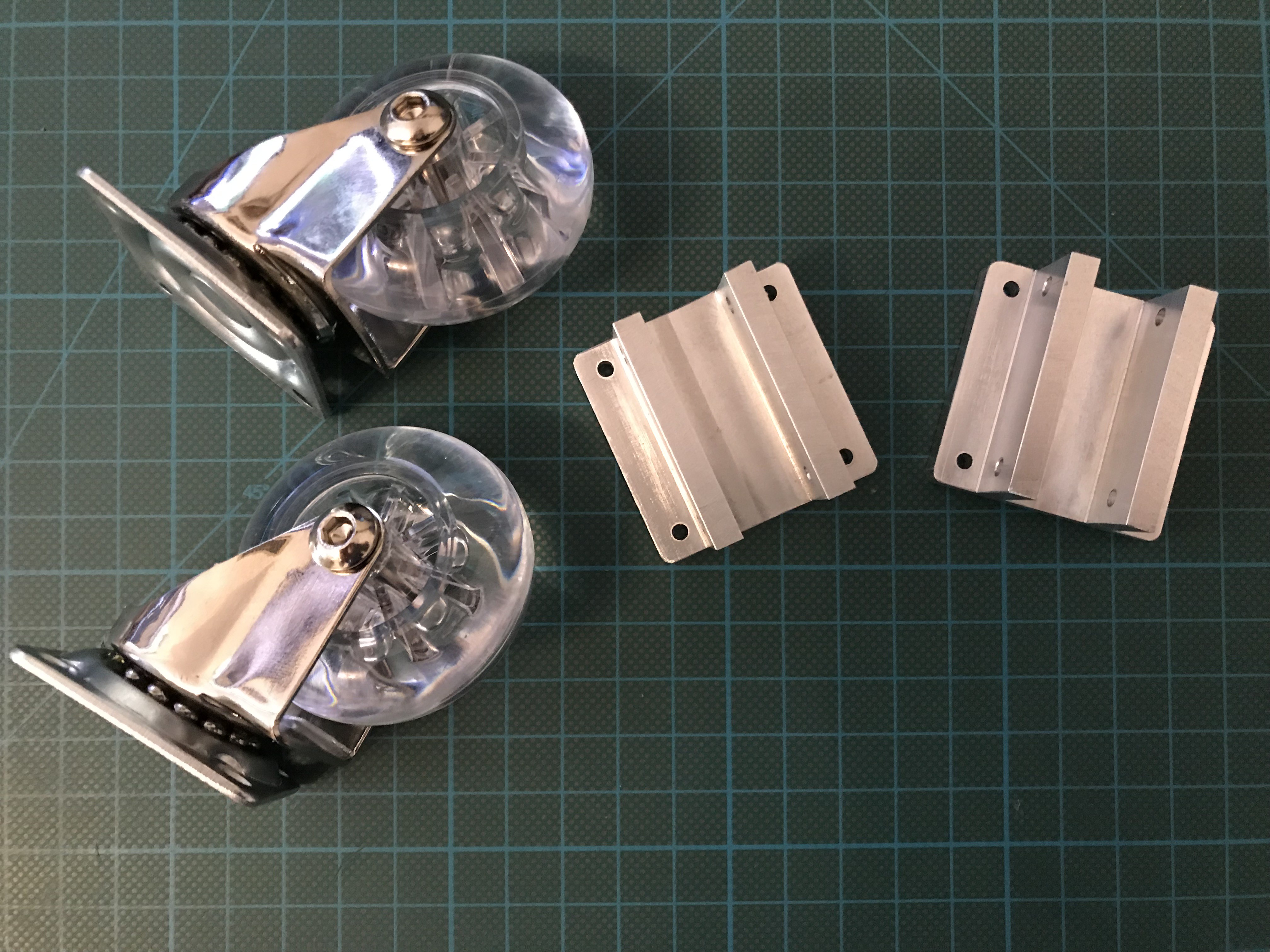
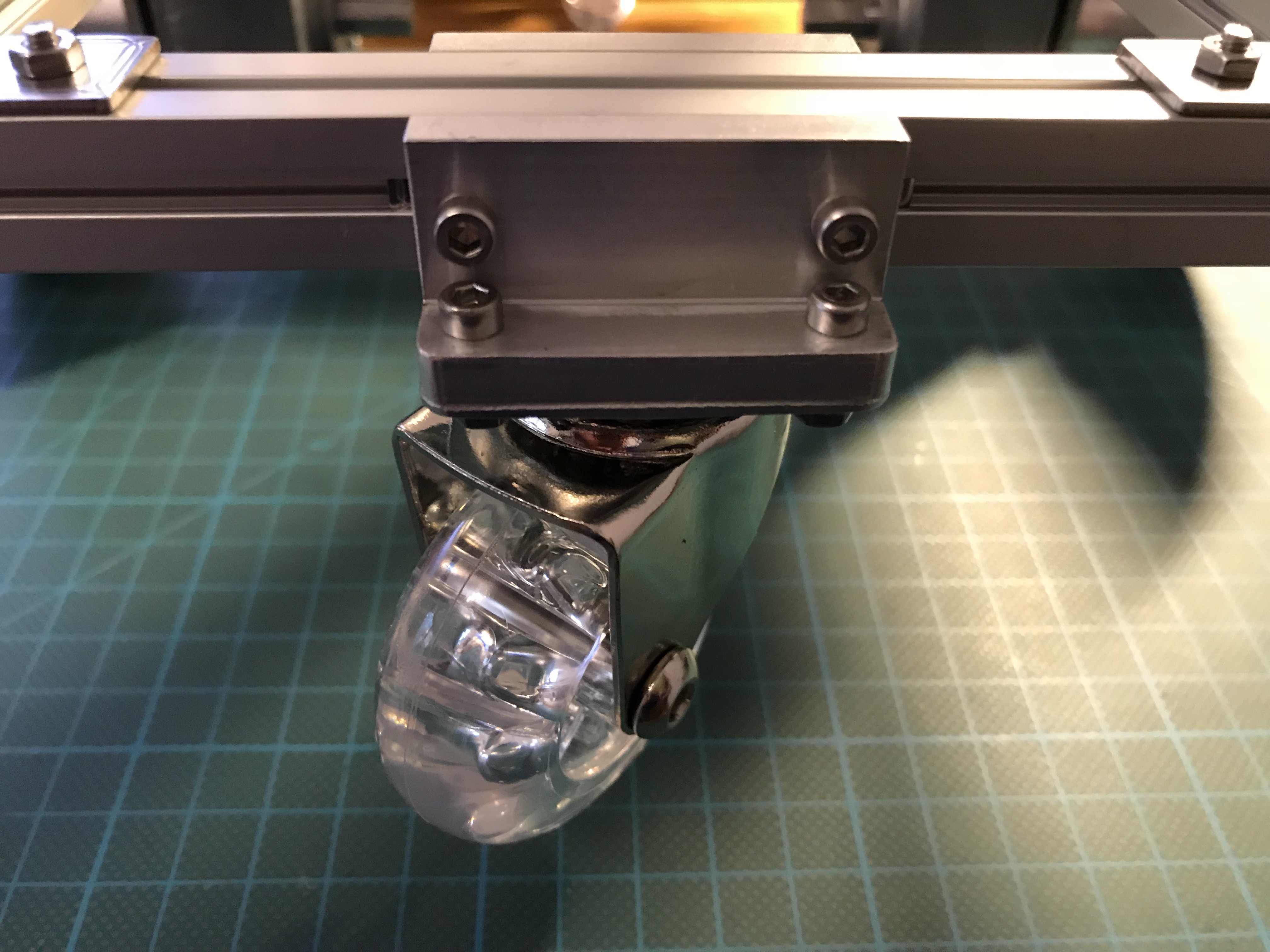
To assemble the caster wheels to the MakerBeam system I CNC'd two mounting brackets:
It is important that the caster wheels have a few millimeter ground clearance, otherwise the robot can not overcome smallest obstacles like a door sill.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.