 middelbeek
middelbeekThe first thing to do is to find/develop/build a rotating IR sensor. As I want to have a frequent update of the position of my robot, I prefer to have a sensor that continuously rotates, and not a system that scans 360 degrees, then turns 360 degrees the other direction and starts all over again, which should be necessary due to the twisting of the cables. I could not find an easy, affordable rotating connector, so I had to find another solution.
One approach could be a 180 degrees video camera connected to a Raspberry Pi, and using some qiute complicated image analysis finding the IR emitters and calculate the angle between them. This can be done, but has the drawback of being complex, energy consuming and relatively expensive.
For this reason I designed an IR sensor that is facing upwards towards a rotating mirror that is under an angle of 45 degrees. A modified servo is used to rotate the mirror.
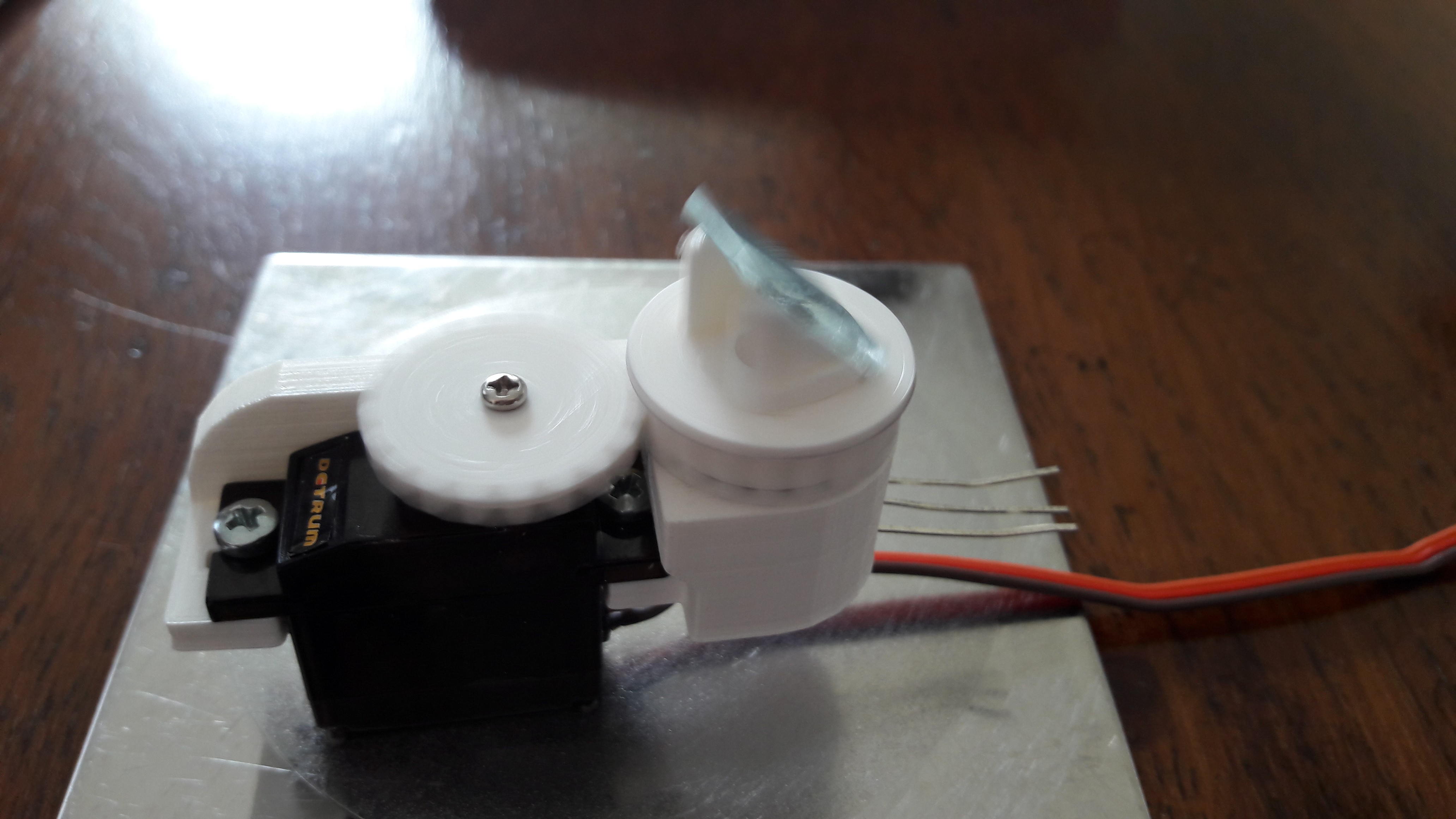
In this way the sensor has an undisturbed view over the surrounding area, undisturbed by cables etcetera.
During one rotation of the mirror the sensor should "see" my three IR emitters, and based on time differences the angle between them can be calculated.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.