 Paul Gould
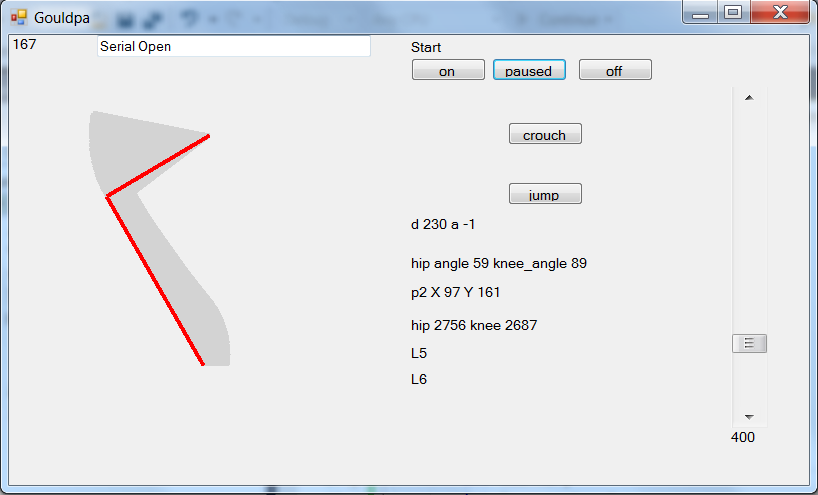
Paul GouldVisual Studio and C# in .Net was used to write a simple test program. An X,Y foot position is generated, converted to hip and knee angles using Inverse Kinematics and sent to the serial to CAN converter (spare PSOC actuator controller). These packets are addressed to the two robot actuators to move to the required position. A second mode just returns Joint positions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
could you give me this c# project?. pleasee read
Are you sure? yes | no
The grey area is like a recording of where it has been previously (Grey = old_Red).
Are you sure? yes | no
Ah okay. Makes sense
Are you sure? yes | no
Very nice work, I was wondering how you find the shape of that grey area I assume is your range of motion. I am trying to do a similar thing. Are you calculating the shape or simply finding the limits by driving the leg around and recording them?
Are you sure? yes | no