 Roger
RogerI had always intended for Sawppy to be an adventure in building autonomous robots, but the Sawppy hardware I built and declared version 1.0 needed software of some sort in order to get up and running. Since I had code for SGVHAK Rover handy, I adapted it to control Sawppy as well. Both rover models had six wheel drive and four wheel steering resulting in large overlaps of functionality. I only had to write adapter code for it to communicate with Sawppy’s LewanSoul serial bus servos instead of SGVHAK Rover’s RoboClaw motor controllers.
At the time I was overly optimistic about how quickly I could get new software up and running on Sawppy. I didn’t climb the learning curve for ROS nearly as fast as I had hoped, requiring detours along the way to build learning robots like Phoebe. In the meantime Sawppy continued running on this “interim” software that threatens to become the permanent software with each passing day.
A symptom of optimism was my decision to not write very much documentation helping other Sawppy builders adapt SGVHAK rover software to run on their own rover. I thought I would have new software soon so why bother? At first this was not a problem – first three Sawppy builds I’m aware of were built by people who made modifications and used their own methods of rover control. (Two are writing their own software, the third was modified for standard remote control.)
But now I’m starting to receive queries from people who want to run SGVHAK rover code on their Sawppy rovers as well. While a talented few have been able to find their own way just by examining my Github repositories, it’s not very friendly to tell people “Go look at the code and figure it out.” I need to put in the time to write instructions for putting SGVHAK Rover software on Sawppy.
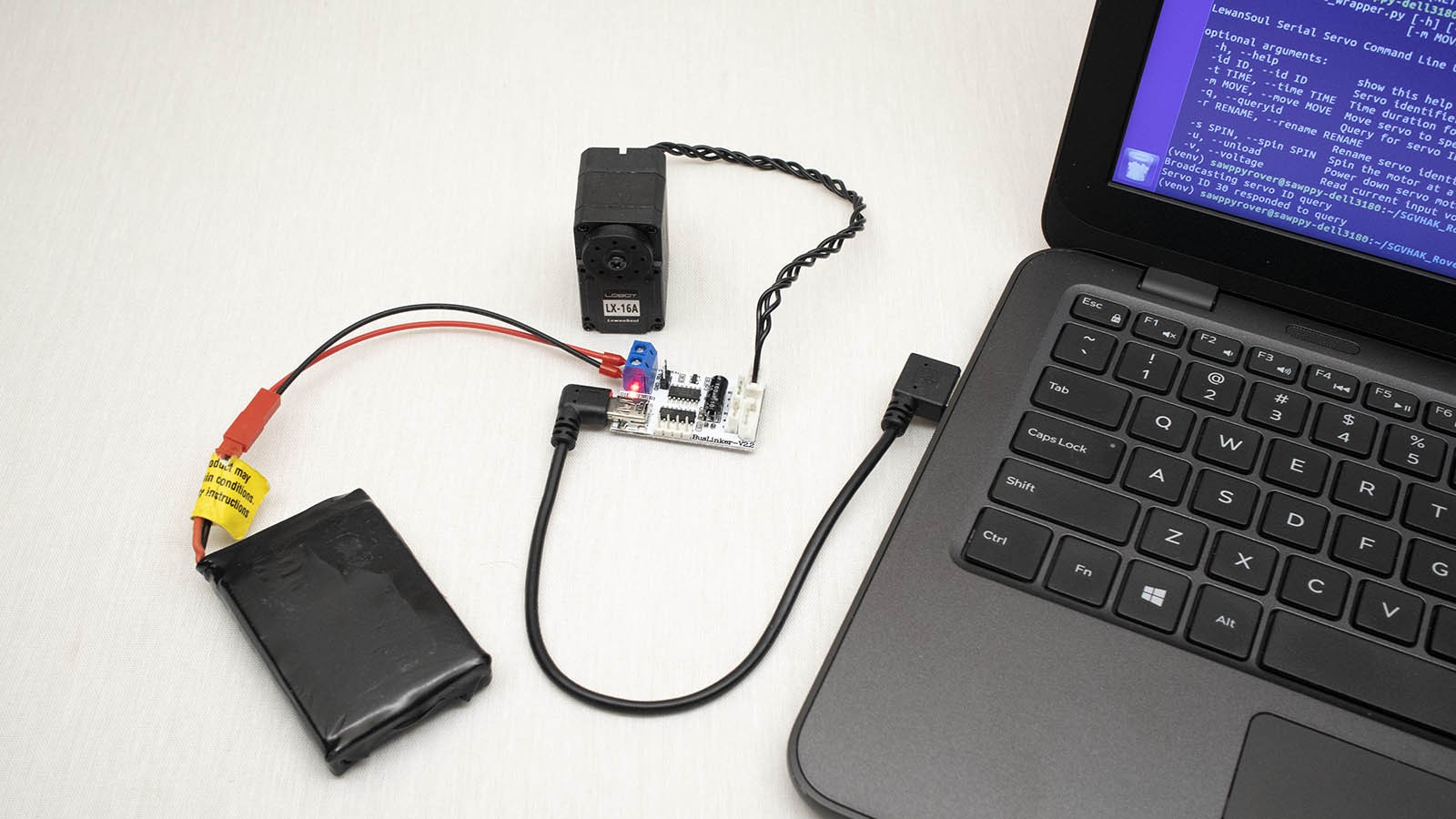
I’m happy to announce that this work is now complete and posted up on Sawppy’s build documentation repository. It walks through assigning unique IDs to LewanSoul serial bus servos, to which configuration files to edit, and which configuration files to just completely overwrite. I hope this will help more Sawppy builders get their rover up and running!
(Cross-posted to NewScrewdriver.com)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.