 Dimitris Xydas
Dimitris XydasI have finally made a decision on the sensor and ordered the Intel RealSense D435 Depth Camera! I also found high-quality CAD models of the whole D400 series here: Production CAD Files for Intel RealSense D400 Series.
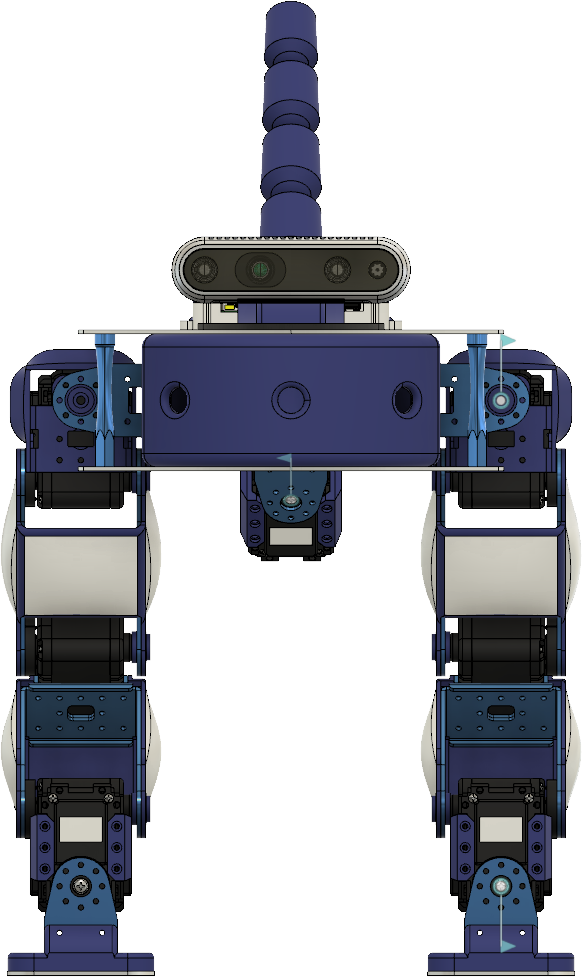
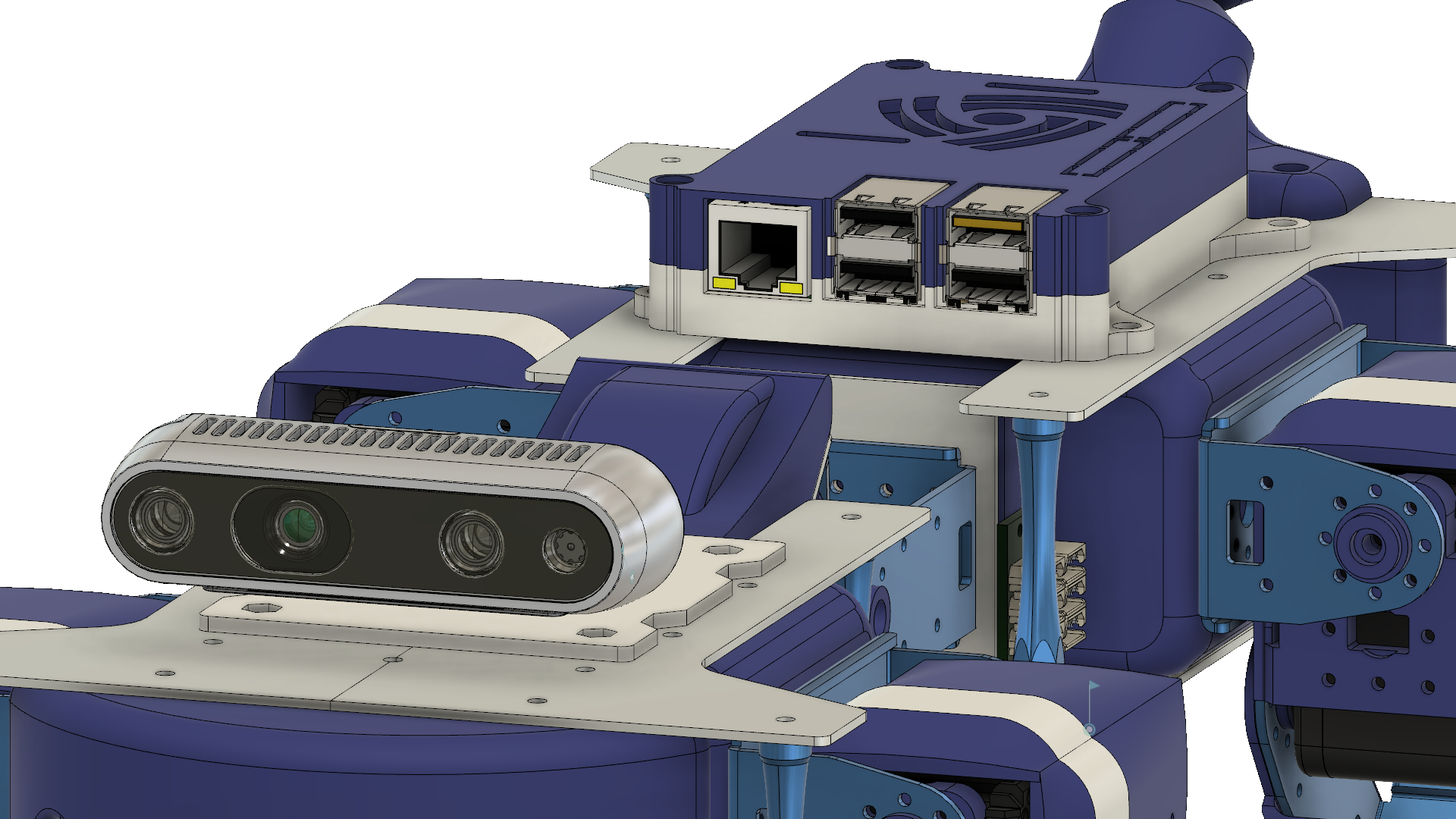
After importing into Fusion 360 and adding a touch of texturing, I added it to the robot model to show a sense of scale. It needs a 3D printed mount to be properly attached to the top of the front body; or better yet, a re-design of the front bumper to integrate the camera inside it, giving an unobstructed forward-facing view.
The camera will be controlled by PC/laptop for now, but will later need to be controlled by a beefier on-board controller.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.