 Tim Wilkinson
Tim WilkinsonThe mechanical design of this robot arm was extensively cribbed from the MeArm Classic design (see here https://shop.mime.co.uk/collections/mearm). While the physical arm looks very different - I wanted something a little less skeletal - the way the outer beams and internal rods interact to keep the effector (that's the end bit of the arm) parallel to the ground at all times, was based on the MeArm. My goal is to add different effector attachments to the arm, and this design makes that super simple.
Three servos move the arm; one servo rotates the arm around the base, while the other two move the arm up and down, forward and back. When the servos move together, the upper arm moves forward and back; if one servo moves independently, the lower arm moves up and down.
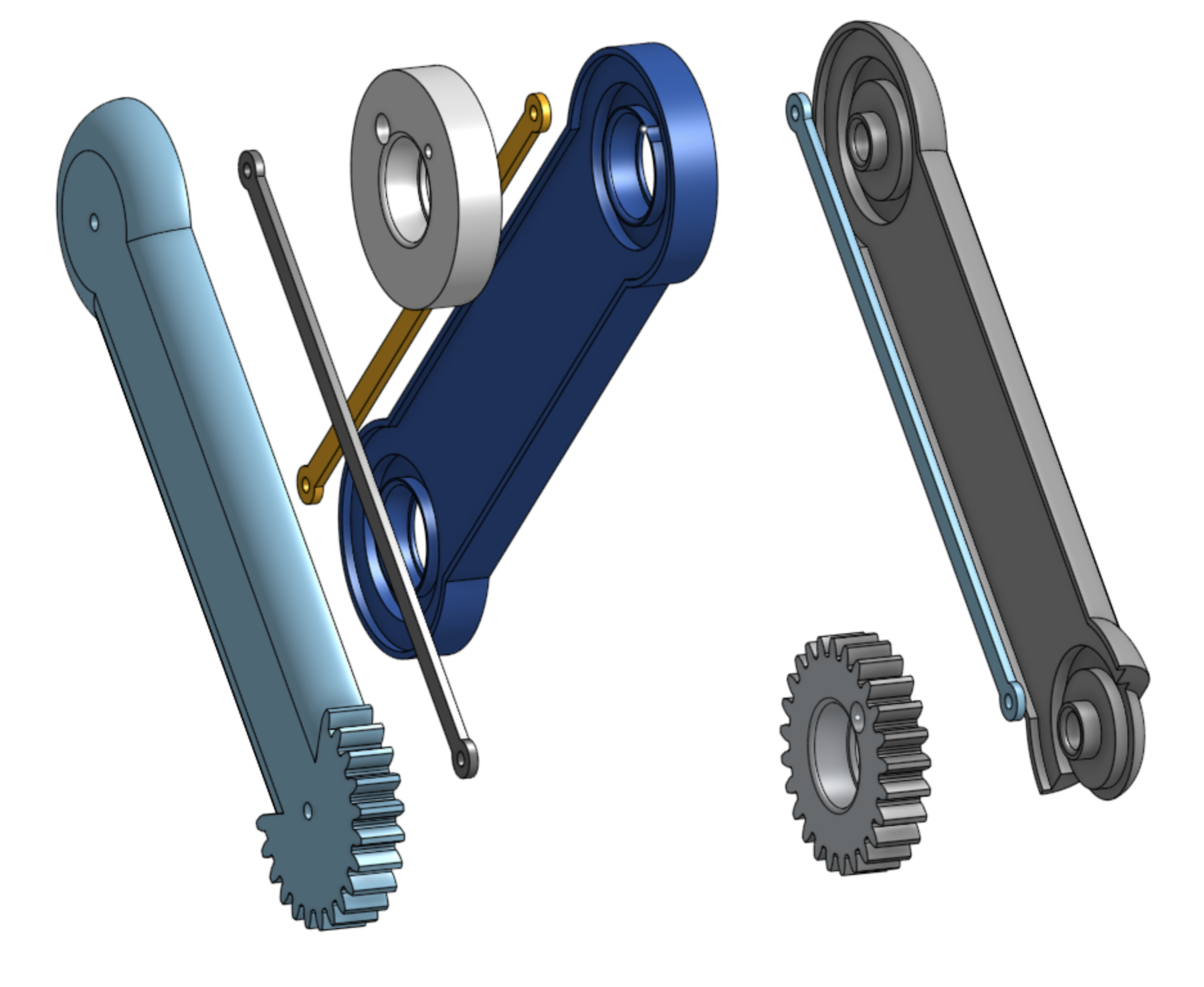
The above shows the section of the arm: three main pieces for the arm and three arm rods to coordinate the movement (plus a few other bits to hold it all together). The rods are connected to the main arm pieces using pins to allow them to move as the arm moves, so keeping the effector parallel.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.