 deʃhipu
deʃhipuSo I spent the weeked mucking about designing PCBs and throwing new features at them, but if I am supposed to ever finish this project, I need to do some actual work on it. So today I tried to stay focused and do the actual steps that need doing. First, a feather-compatible robot would be great, but it's also complex. At first the only thing I will need is I2C, so let's just make a minimal PCB with just that broken out.
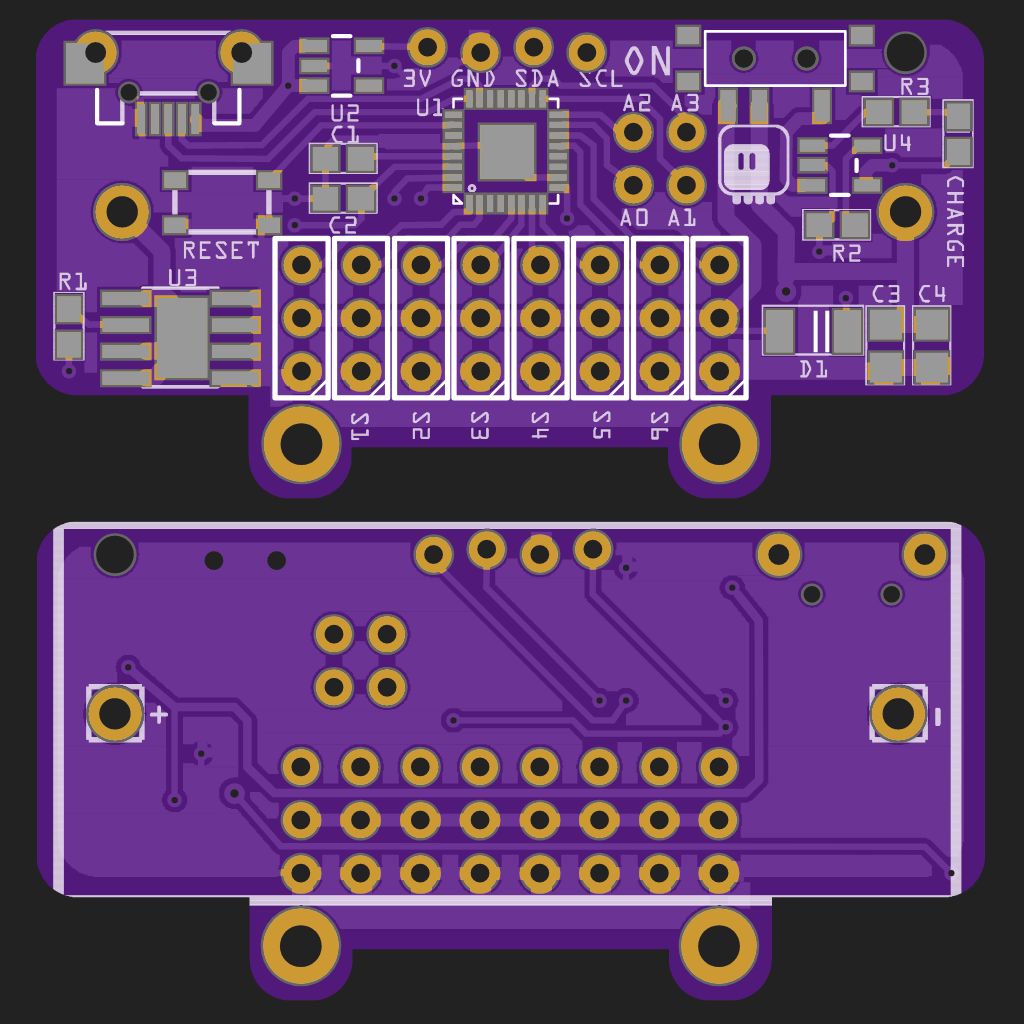
Second, all this is pointless if I can't control the servos. So I need to make sure the pins I connected to servo signals actually can do PWM all at once. The easiest way to do it is to just quickly compile a custom CircuitPython firmware with those pins made available, and try it on a Trinket M0. That's exactly what I did, and of course it didn't work. I had to swap two of the eight pins to make them use different timers, so that they can be used all at once. Of course that made the layout a bit less pretty but that's fine.
Once I have figured out which pins will work, I also fixed the feather-compatible schematic. That took considerably more work, since I didn't have any free pins I could switch to, and there were certain requirements for functions available on certain pins. In the end I think I got it, though, so that PCB is fixed as well.
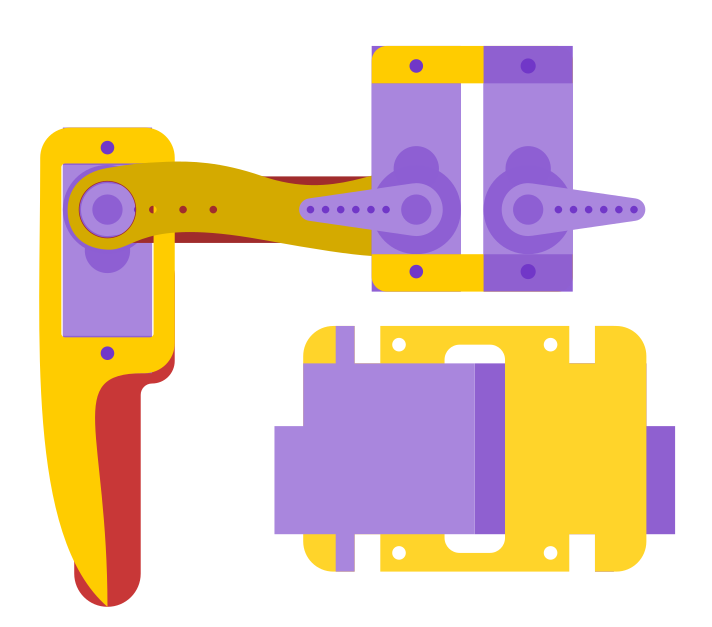
Finally, I need designs for the leg pieces for that small board. Laser-cutting is considerably cheaper than PCBs, and now that I can order it from Elecrow alongside the PCBs, it doesn't make it much more complex. So I had to re-do the legs, but since I want to use the same code, I wanted to keep the same dimensions. So some reverse-engineering of the PCB designs was necessary:
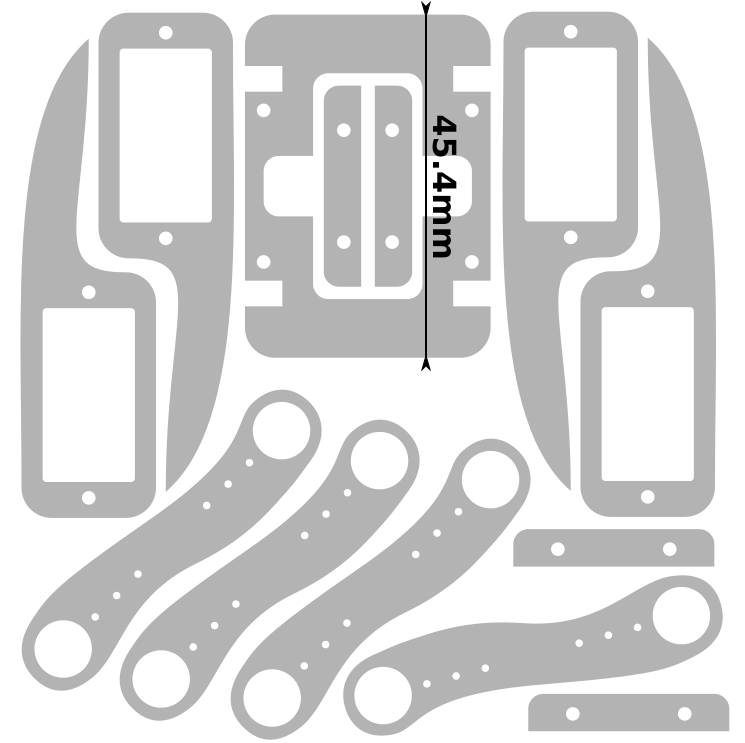
Once I had all the dimensions and shapes figured out, I just had to arrange all the parts on a 10x10cm sheet:
Now both versions of the robot PCB, the Fluff M0 board and the laser-cut parts are on order — the work will continue in a few weeks when they arrive, and in the mean time maybe I can focus long enough to program the walking code.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.