 lion mclionhead
lion mclionheadThe original vision was a big UNIX box sitting in the middle of a living room, like an Onyx 2. Some of the early UNIX boxes might have been designed as pieces of furniture. It would contain all the media the lion kingdom ever had, on some kind of 200GB internal disk. Optical storage became cheaper & more reliable than hard drives in the late 1990's, so the plan shifted to a giant robot which would make thousands of disks behave like a slow hard drive.
The robot was originally supposed to load the disks into a desktop drive. Commercially produced robots of the time did it for a lot more money & much less capacity. The lion kingdom thought it could save money by relying more on machine vision & wood. As the problem grew in complexity, the robot was pared down to just an organizer.
The robot was built twice. The 1st one was made of balsa.
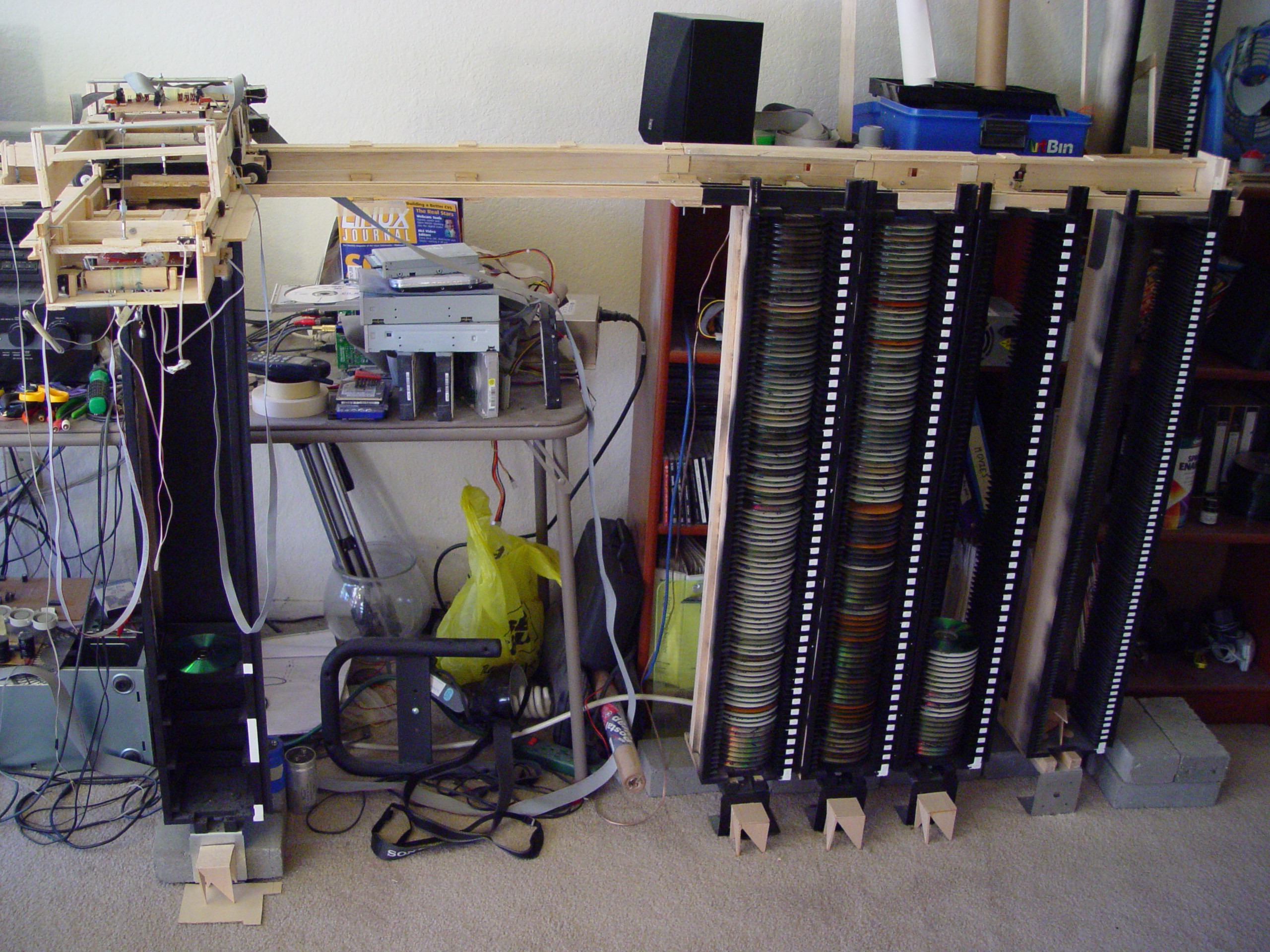
The 1st tower had 1 disk per row & took an eternity to fabricate. 3 more towers were built with 2 disks per row & a low density loading tower. It was fully functional, by this point. It would transfer disks from high density towers to a loading tower closer to the computer, where a lion could swap them in the drive. Various attempts to move the disks into the drive by suction proved too bulky & slow.
The 1st version was entirely TTL logic, driven by a giant board on the floor. It read all the photodiode voltages with comparators & multiplexed the sensor inputs & motor control outputs down to the parallel port. It was quite a leap just to remember anything about TTL logic that lions were shown in school, just 5 years earlier.

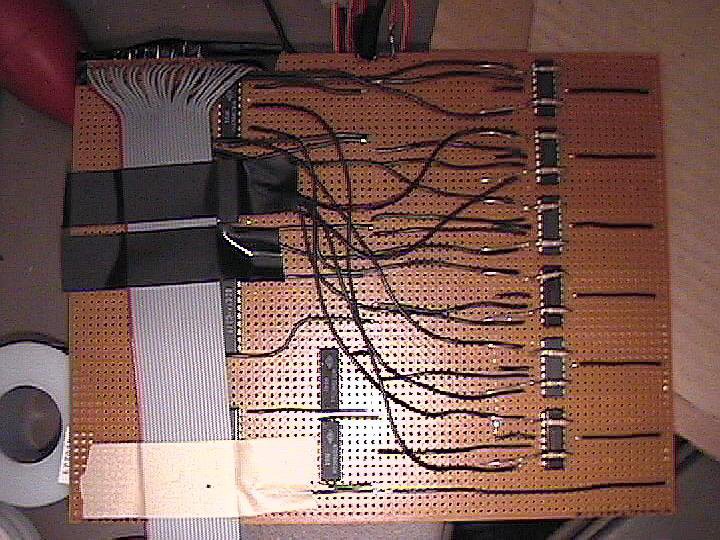


The very 1st point to point soldered board lions made.
The lion kingdom still used TTL logic in 2002 & viewed microcontrollers with their fancy serial ports as an impossibility in the short term.
Enough soldering of registers, counters, & parallel port pins could just barely convert a command line input to a physical PWM signal to control a servo, but it wasn't scalable. A TTL logic based robot could be abstracted into a bunch of registers with a way of reading & writing the registers with data lines & address lines in the parallel port.
Each bit in a register was the voltage of some sensor or motor. Reducing motor control from an 8 bit PWM value to a 2 bit H bridge value was the breakthrough that convinced lions it was possible to make a robot. Reducing an ADC from 8 bits in a register to 1 bit from an analog comparator was another breakthrough.

The TTL logic board was controlled by a modern PC. Hard to believe ancient TTL logic from the 1970's was the only way for all those feeds & speeds from the 2000's to access the real world.
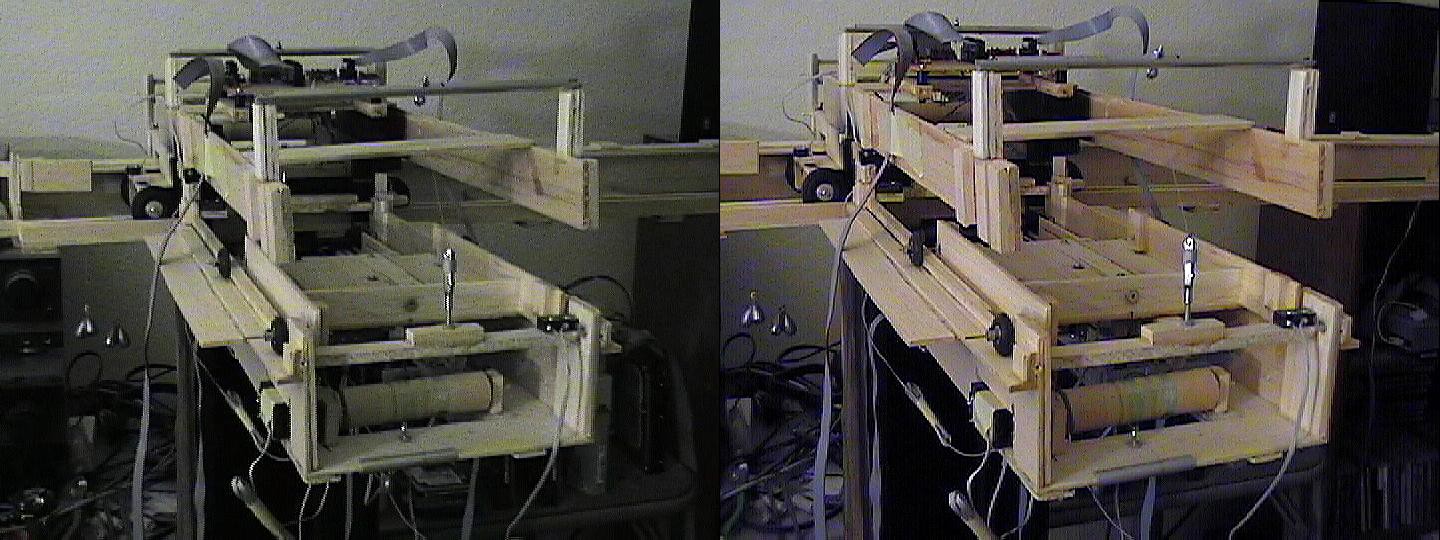
The balsa robot had a short life, despite appearing to contain a lot of disks. The disks had no caddies & risked getting scratched. It was built & all the disks were loaded in place, but the moment it had to be moved, it fell apart. The balsa was too fragile. After the robot was built, disks also started coming up erased from exposure to ambient light.
Before the 1st robot was finished, lions started trying microcontrollers in late 2002.
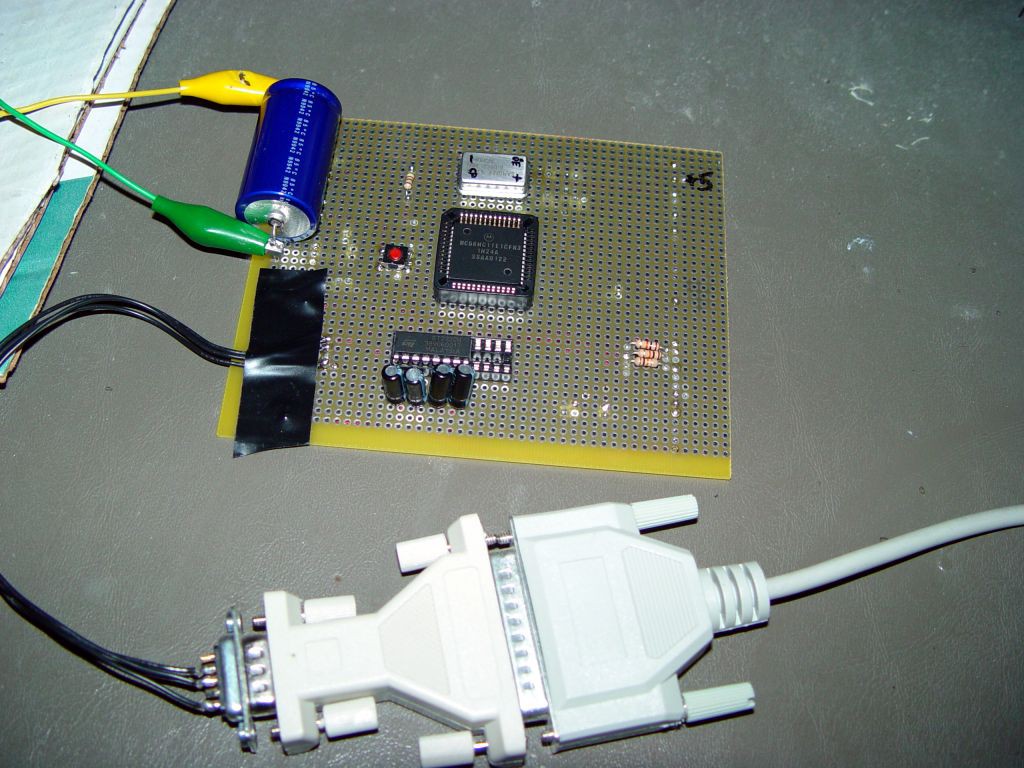
There was no Arduino in 2002, just buying an MC68HC11 & soldering it. Without an oscilloscope & very little knowledge of how the serial port worked, the lion kingdom gave up on making it print hello world. 6 months later, in June 2003, the lion came back to it & it finally worked. It turned out in the microcontroller world, the serial port wasn't independent of the CPU speed. The serial port was locked to the speed of the crystal, which was 50% faster than what the datasheet was written to. The serial port was 1800 baud instead of 1200 baud.
Despite having only 512 bytes of RAM, it was way beyond TTL logic.
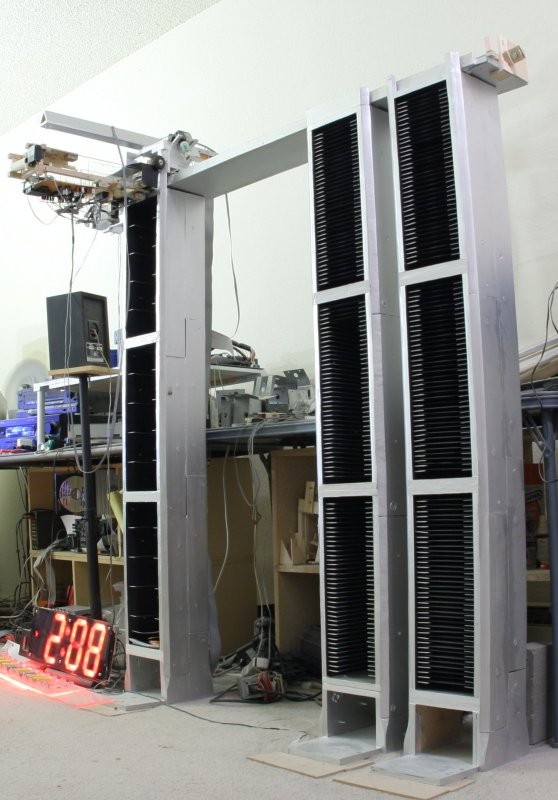
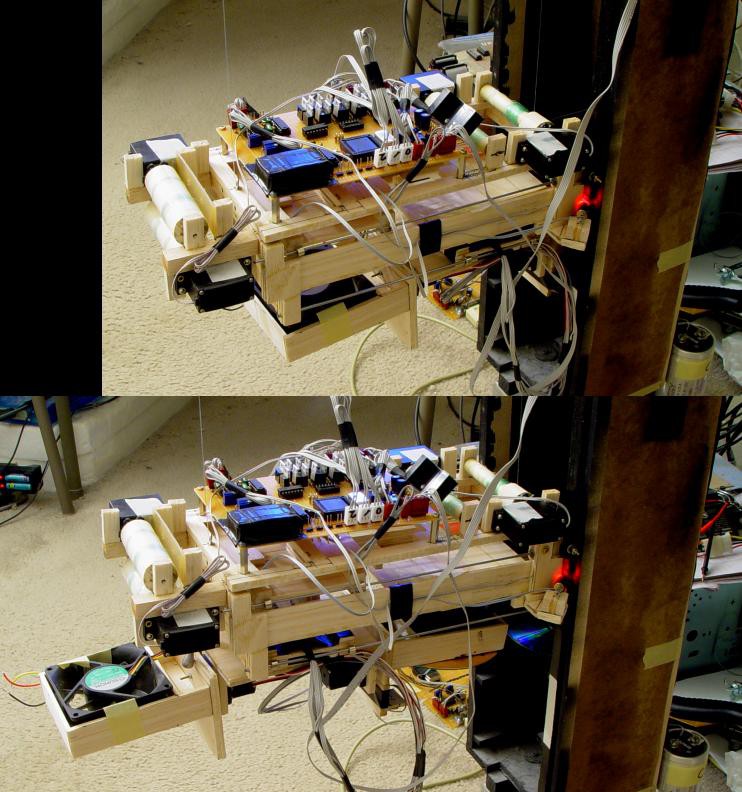
In mid 2004, a new robot was started, with all microcontrollers. It was made of MDF & steel, with the disks inside caddies. The microcontrollers made it so much lighter & faster. 3 high density towers & a low density loading tower were built. This worked as designed for many years, until the capacity was used up.
There was no effort in optimizing the microcontrollers or the serial communication. 12V RS232 lines went all the way from the computer to the robot, which limited them to 57600 baud. The firmware was loaded into RAM before every use, rather than learning the protocol required to write the flash.
Unlike 3D printing robots or quad copters, the DVD robot had to navigate a large area to below a millimeter or it would either scratch disks or load the wrong ones. The cheap solution was laser pointers with apertures outside the lenses, reducing the beam size to 1mm diameter.

There were 2 red lasers for vertical positioning. 1 laser sensed the disk. 1 laser sensed the tower steel. They bounced back to IR photodiodes. Once the lasers positioned the robot, they had to flip out of the way for the disk to be accessed.
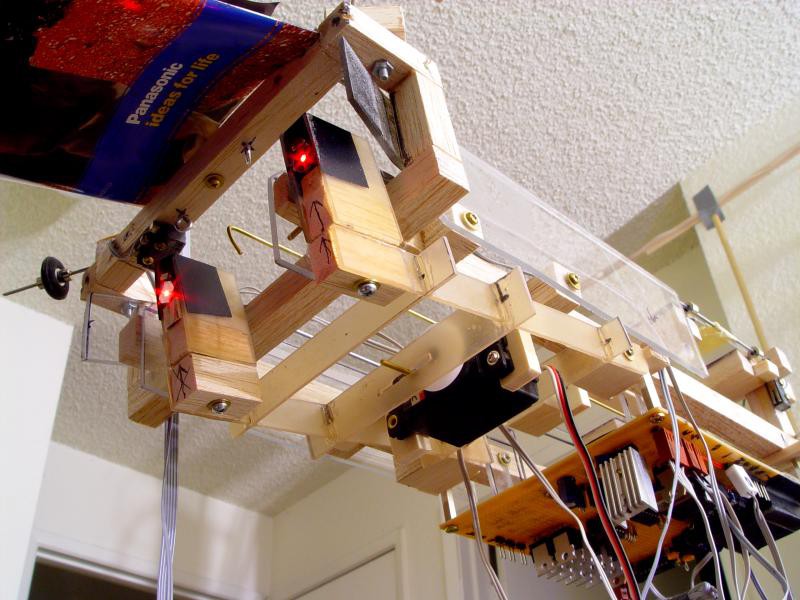
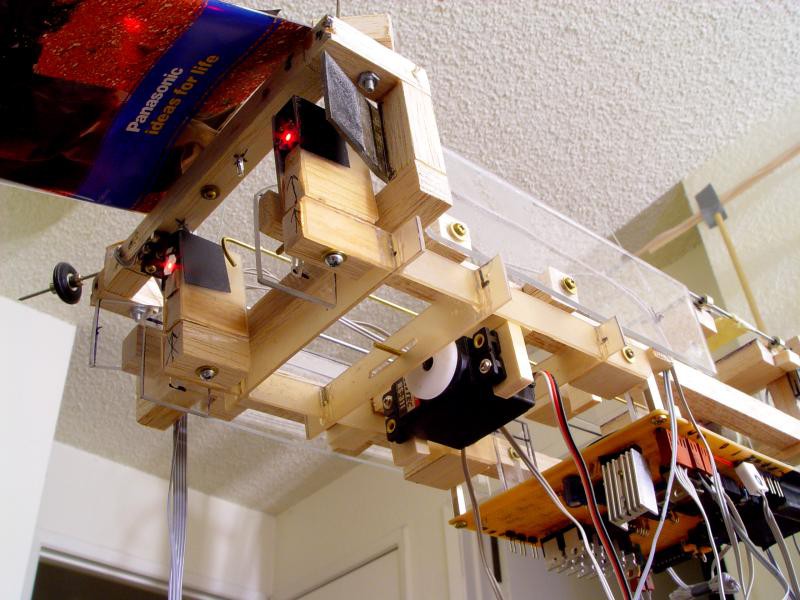
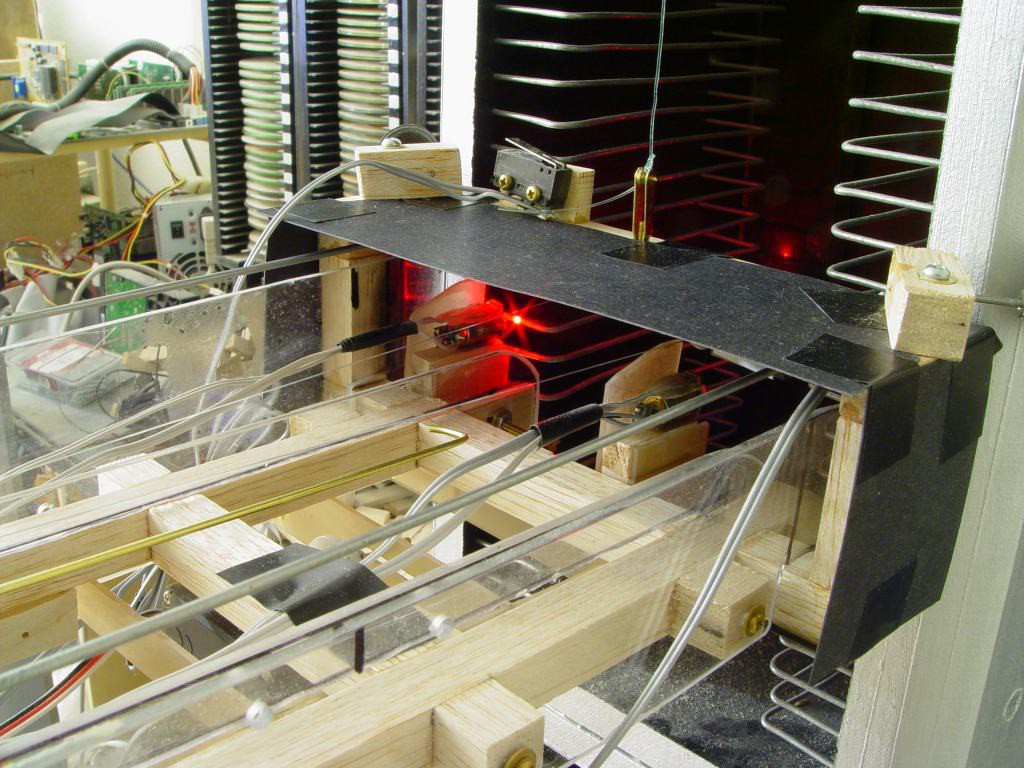

The output as the robot traveled vertically was not pretty. The key developments were coloring all the disk caddy's black & driving the servos in pulses to precisely hit the caddy.


This cleaned up the laser output. The slow baud rate was still a major limitation in its accuracy. It had to descend to the bottom of the tower 1st, then count the laser pulses while ascending. That made it slow enough for the baud rate to keep up & to stop in time, since the servos had no brakes.
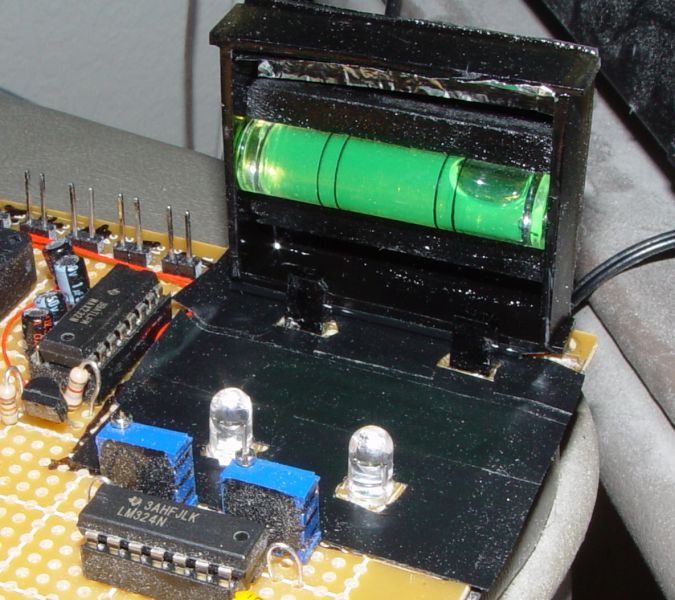
What about keeping it level as it traveled vertically? There weren't any IMU's in those days, that a starving programmer could afford. A lion in those days wouldn't have known how to make the complimentary filter. It was just a bubble level with 2 IR sensors. It was slow & only worked within a limited set of angles, but it was just enough.
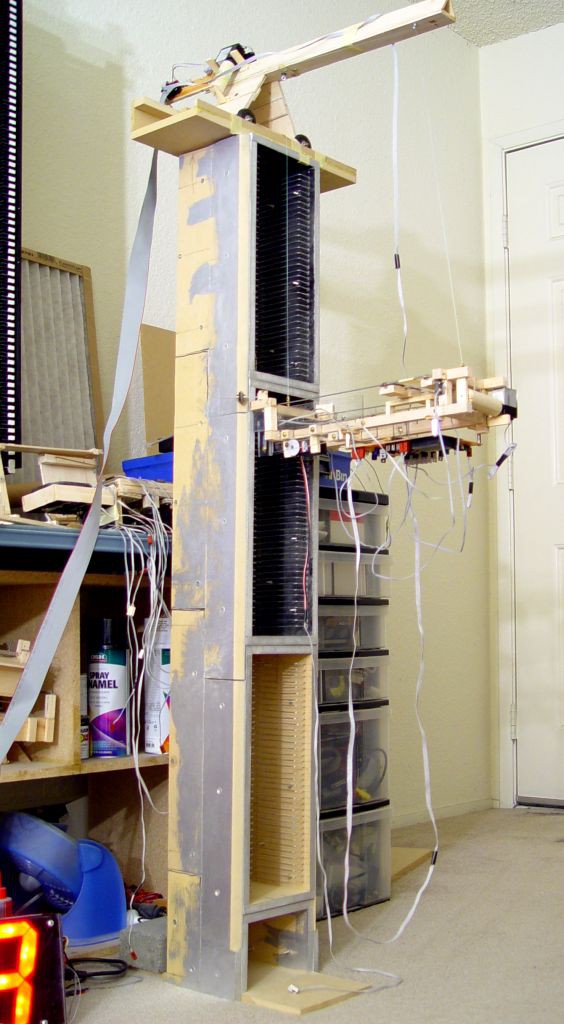
The amount of sawdust from grinding out the towers was quite disastrous. The apartment was coated in sawdust for the next 10 years. The 1st tower was discarded, after finding problems.
The towers had to be angled to get the traveling robot to press into them. There were many diversions into machine vision, using fans to improve positioning, trying to fabricate the towers more quickly out of plaster or epoxy, trying to make a grabber which could place disks into the drive, using different crane schemes. It would have been a lot faster to already know what wouldn't work & just build the 1 final robot.
A new robot which had all the servos all on 1 platform & could load disks into the drive was the most ambitious failure. A 2nd sled went on the bottom. It would slide into the loading tower, pull out a disk with suction, slide out & put the disk on a drive tray. The crane servos were put on top, so a single board could control all the functions.
The idea persisted for 5 months, reached a very high refinement, before the need to store the disks in caddys which couldn't be placed into the drive was discovered.
After encountering the need to build a 5th tower, a very high error rate for optical storage, very high tweeking required to keep the robot running, exploding rent prices, & magnetic storage improving, the last optical disk was burned in 2011. By then, the robot wasn't running anymore because there wasn't enough room for the crane to move around. Most of it was dismantled for spare parts. The towers may eventually be sold.
Detailed video of Heroine2200 when it was new, showing some of the problems it had to overcome. Based on later videos, it needed a lot of manetenance. Lions don't remember most of how it worked. It clearly could have been much better with modern methods, but there would be no point.
The error rate grew as these disks aged, manely in the outer tracks. They were damaged by ambient light & oxygen getting into the laminations. The oxygen leakage became famous, but was never fully solved. Considering how sloppy the tracking of a removable disk like this is, how the disk flops up & down while its diameter oscillates in & out, how it gets scratched, it's amazing optical disks stored as much as they did.
A very useful utility in those days was
https://cdn.hackaday.io/files/1592676814079328/badfile.c
Since most of the data was multimedia & most of it can now be gotten from the goo tubes, errors are tolerable, but there was no way to preserve the block order in a file copy. Without preserving the block order, the quicktime/mp4 files couldn't be played. The mighty dd command
dd if=/cdrom/janet1/track01.wav of=janet1/track01.wav bs=4096 conv=noerror
would shift the blocks when it encountered an error. badfile.c would pad the bad sectors with 0. The lion kingdom went through many DVD drives. The best one was a 2013 Macbook Pro. They all eventually died.
THE RECOVERY EFFORT
The dream of a single UNIX box storing an entire life's media finally became attainable in 2018, though still requiring a bit of compression. The journey began with Comca$t's internet proxy. It was incompatible with Linux kernels from long ago & causing dropped connections. New kernels no longer supported the 10 year old graphics card. Upgrading the graphics card required a new base system. In this process, the database for all the DVD's in Heroine2200 was lost & there was no way to find anything without loading every disk or backing the whole thing up.
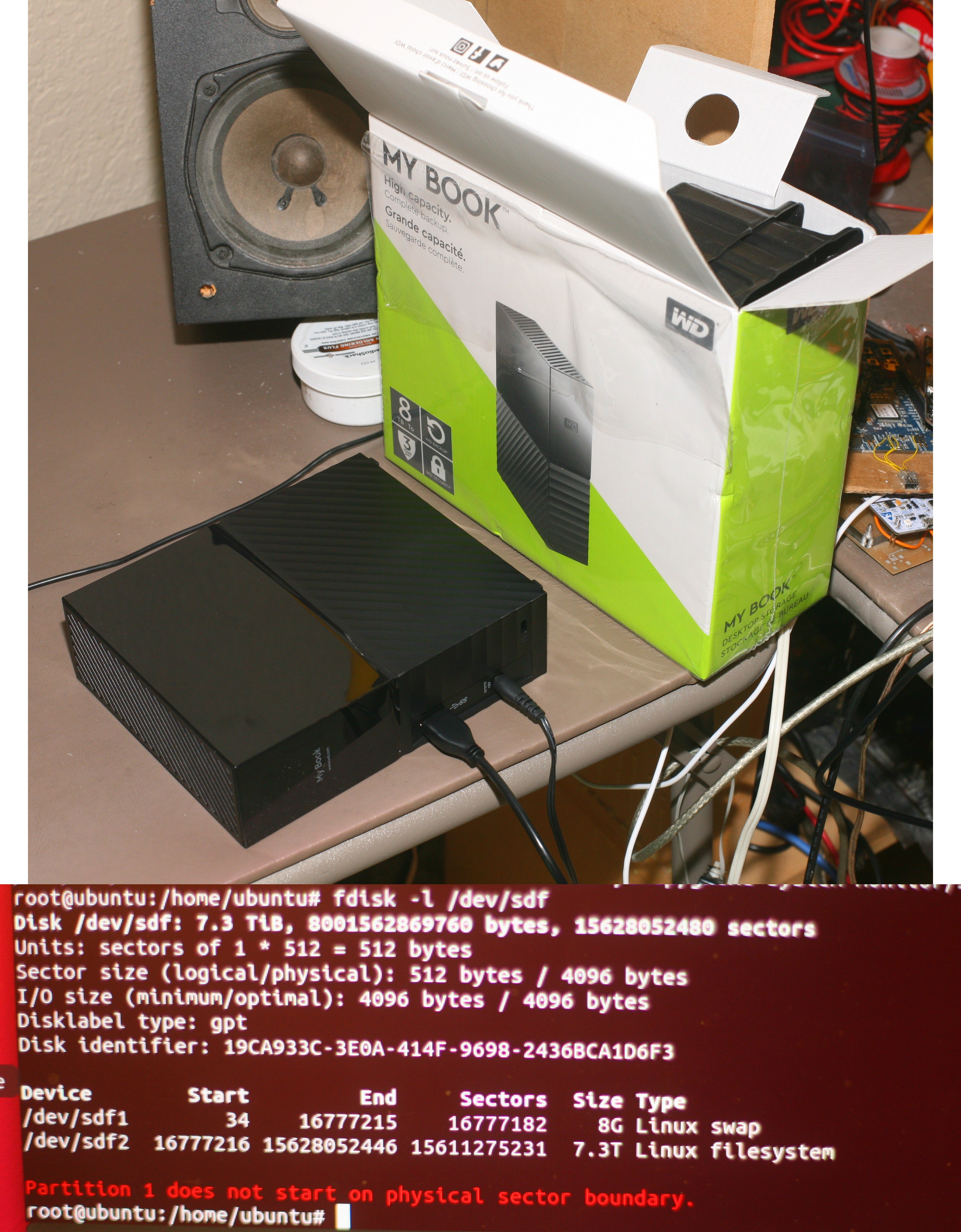
The answer is yes, the obscenely cheap, giant drives marketed only for backup use can be used as internal drives. Since discovering this, the process became known as shucking.
Once you don't mind losing the warranty, they can be torn down & an ordinary SATA drive extracted. The lion kingdom risked $170 + $17 tax in an act of desperation because for the 1st time in 30 years of owning desktop hard drives, hot weather seems to have damaged one. It was a good time to start moving the entire optical storage collection of 20 years to a hard drive. The lion kingdom had 2 other hard drive failures in Hitachi micro drives, but not root filesystems. Japanese hard drives have proven the least reliable.


After much destruction, the goods slid out from the bottom to the top, in their own plastic assembly. The assembly was locked inside by tabs & had rubber shock absorbers.
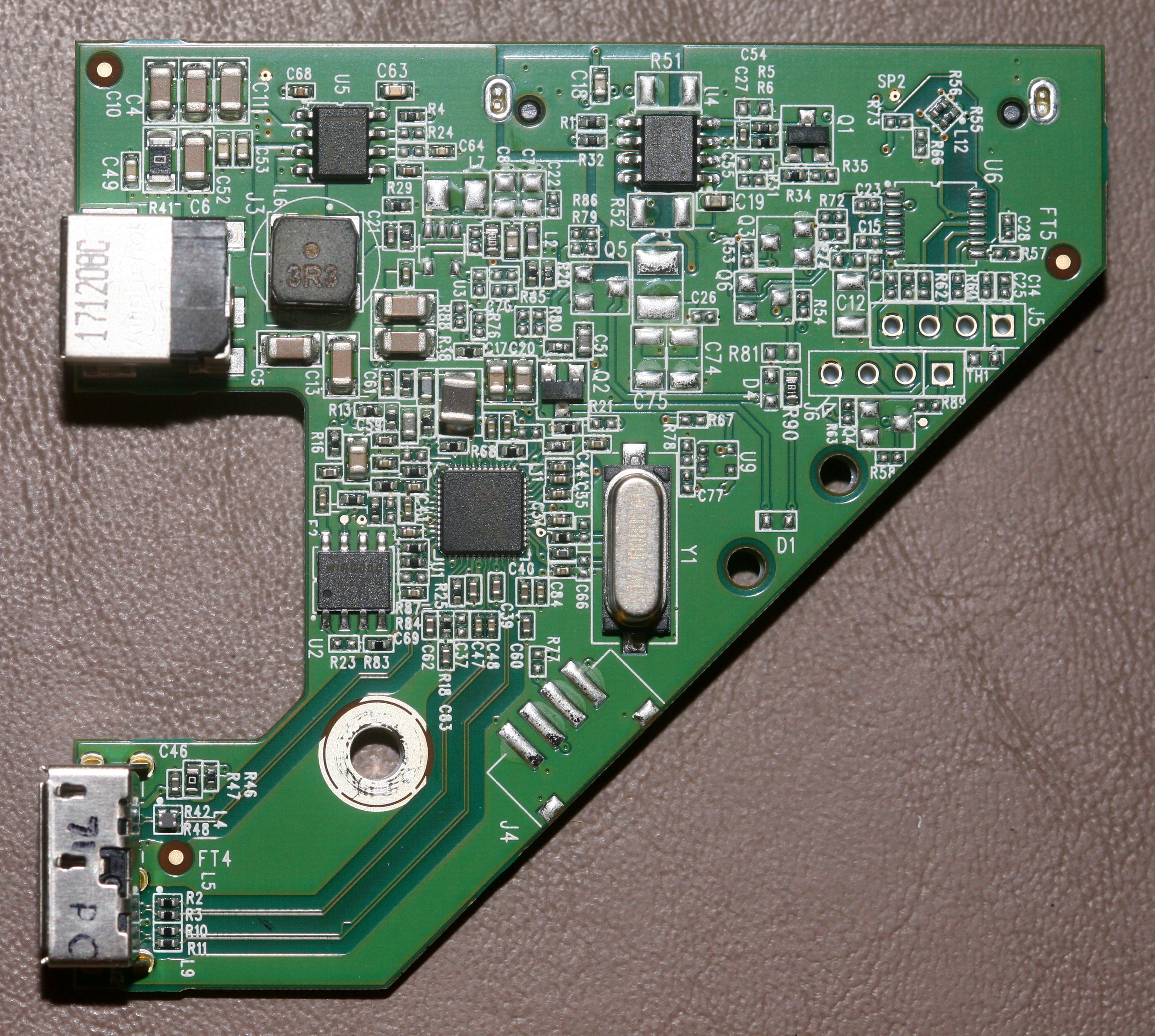
The teardown also liberated a USB to SATA adapter & 12V 1.5A power brick. The USB adapter does the magic trick of spinning it down when inactive, without disconnecting it.
All USB drives are much cheaper than what are being sold as internal drives. Suspect the support & warranty costs are much higher when people install the bare drives.
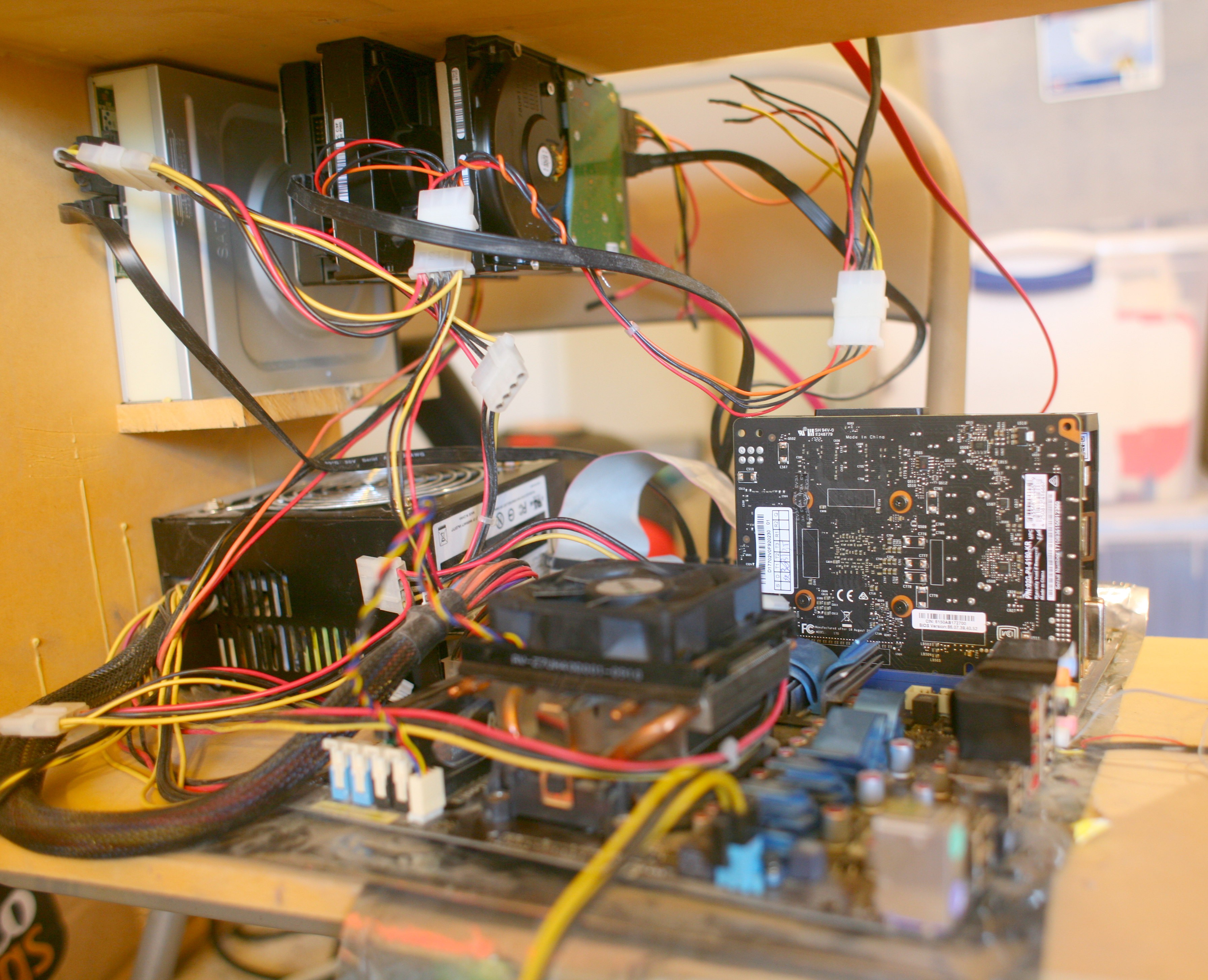
The lion kingdom got into the habit of tacking on 2nd paw, small hard drives as needed. This creates a lot of heat & uses a lot of power. The 8TB should eventually replace all of them.
It was surprising how much of the archived data is stuff you can now get for free online, in better quality. After 2002, it was manely movies. The next most popular files were awful video experiments, followed by rare TV clips.

The mane content of interest is the complete archive of Xena episodes. The bad dialog is there. The bad NTSC color is there. The lion kingdom had an ill fated fascination with histogramming the black levels, but it didn't have much to lose. Warner Bros strictly bans all gootube uploads & no-one who was alive when Xena was on the air is still using the internet, so it's a rarity.
Most of the content is video from a time when VHS was still the tried & true way. The mane reason was cost & the spatial quality was unthinkable. Tapes cost much more than digital & the amount of space required to store that much video on tape was too expensive, even at the $900 rent of those days. The only advantage to VHS was it was faster, easier, & did a full 29.97fps. Purpose built DVD recorders just began to appear in 2002, for unthinkable prices & much lower density than custom software.
A pawful of videos made before 1999 would have been better off in VHS. Doing the rest in digital was a very prescient decision. There's no practical way to read VHS tapes anymore.
Complicating matters, as certain brands of disks started failing, they were backed up on new disks & combined with new files. The old disks were put in binders. As disks got cheaper, thousands of small files containing interesting scenes were replaced by the complete movies. Then the movies were replaced by higher quality movies as DVD & then HDTV came along. Some are stored 3 times.
Some lessons learned from transferring thousands of optical disks:
cp -ai preserves all the directories, dates, permissions, & file types without hiding all the IO errors in a sea of verbosity.
Most of the work is loading the drives & organizing the output. Using as many drives as possible speeds it up.
Newer drives hit fewer errors than older drives, as their lasers burn out quickly.