 Chris Graham
Chris GrahamIt's been a while since I did a log update in that time I tested the PCBs that were on order at the end of the last update,
These were the key results:
- The lip and oral cavity sensors worked very well. Excellent controllability of both. For the next prototype I'll inset the light pipes slightly into the front edge of ledge to increase the range of control to higher lip forces.
- The Pressure sensor and instrumentation amp worked well. The zero-pressure output was at about half of the 3.3v supply. Blowing drives voltage down, sucking drives voltage up. Amp gain is about 800 to get large enough voltage swing.
- Tested a small capacitive sensing electrode inside the top of the mouthpiece to measure upper lip position. Reading with the Teensy capacitive sensing worked surprisingly well. The the next prototype will use capacitive sensing for the the upper lip.
- The method of connecting the mouthpiece to the main board by plugging the pins of the optical components into a connector on the main board worked but was too fragile. In the next prototype I'll use a real connector on the mouthpiece to plug into a connector on the main board. This will require a separate PCB for the mouthpiece.
Based on these findings I revised the 3D models and ordered new PCBs including the main board and a new vertically mounted small board to hold the mouthpiece components and the connector from the mouthpiece to the main board.
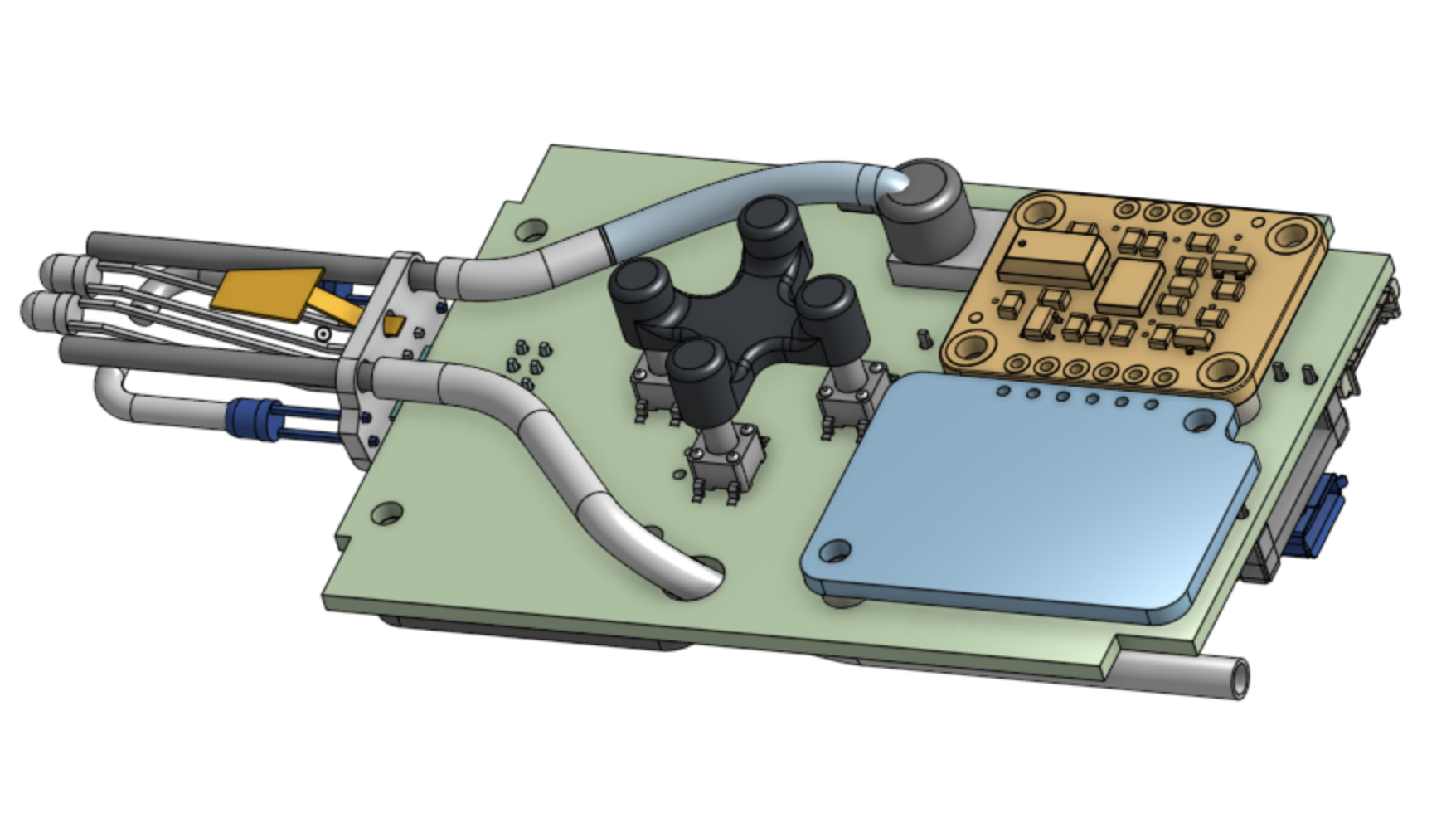
This is what the design looks like now with the mouthpiece shell and main housing removed:
You can see the new mouthpiece board to which all its components can be assembled before inserting them into the mouthpiece shell. This also shows the four switches for user control and a rocker to allow them to be pressed through holes in the housing. In the upper right there is an optional I2C connected Adafruit 10DOF IMU board. The the lower right is another I2C connected daughterboard for future expansion. There are two tubes from the mouthpiece, one carrying static pressure to the pressure sensor and the other carrying air flow out the back of the mouthpiece housing. Having separate tubes allows amount of air flow to be adjusted by a set screw in the mouthpiece without affecting pressure detection by the pressure sensor.
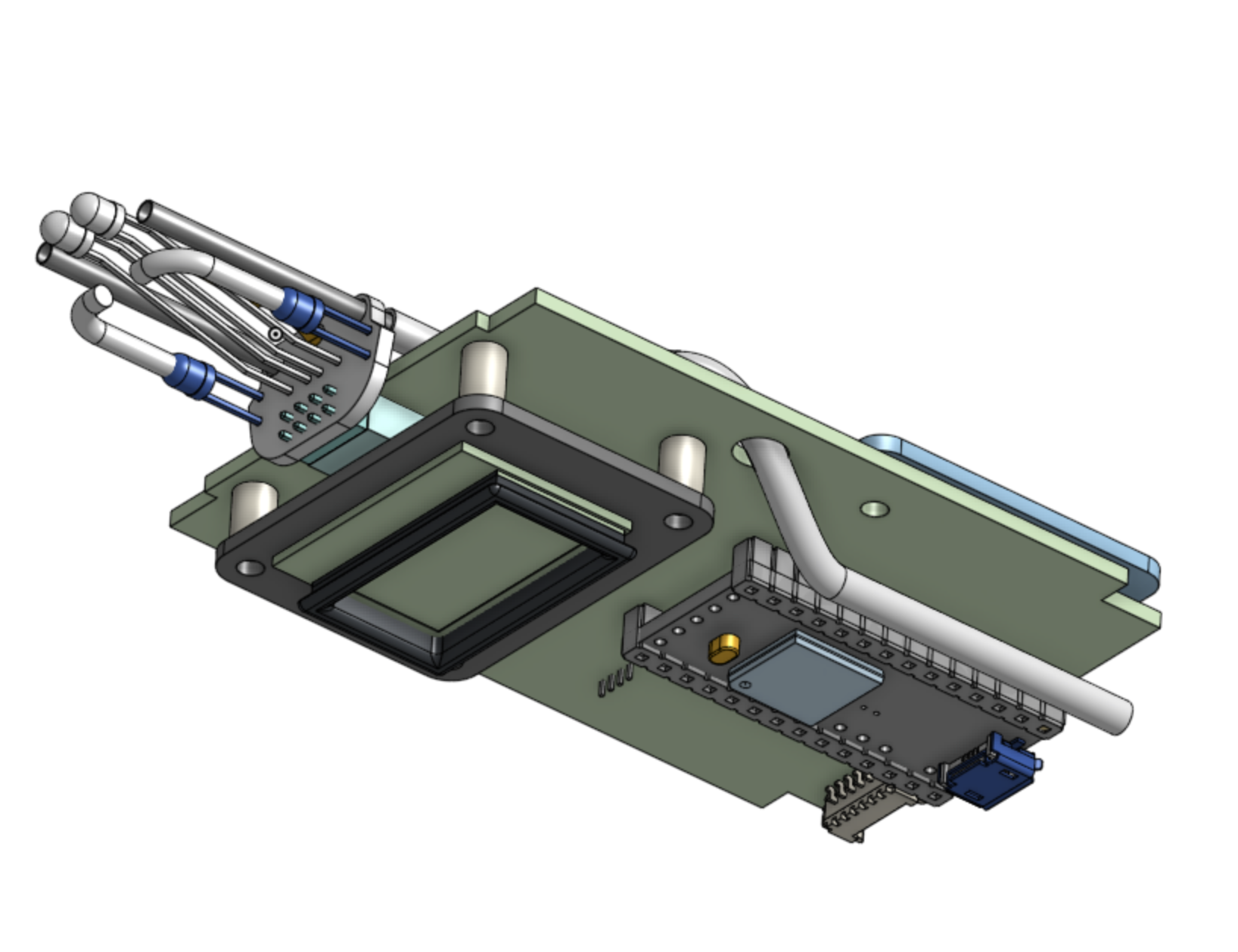
This is a view from the bottom. You can see the mouthpiece components and connector board, the mouthpiece connector on the main board and a Adafruit OLED display board mounted on the bottom of the main board. The tube is to carry mouthpiece air flow out the back of the housing. The Teensy 3.2 is connected to the bottom of the main board. In the lower right is a 6 lead connector for connection to a finger unit. I dropped the plan to use I2C in favour of a serial link with flow control. The signals are RX, TX, CTS, RTS, power and ground. Serial will be faster, easier to program and more versatile.
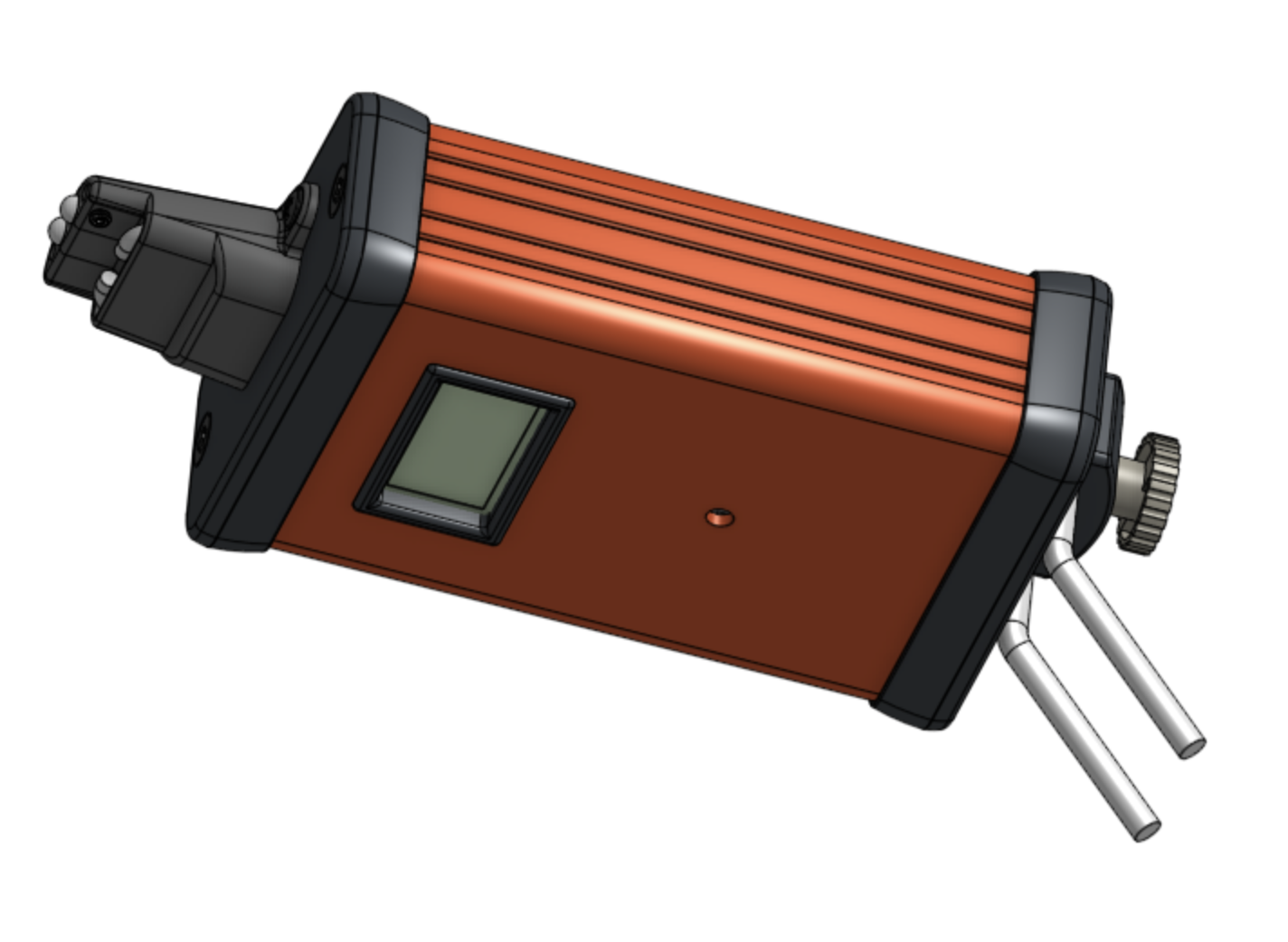
Here are a few more images of the design with the housings installed.
You can see the buttons on the top of the housing. After some experimenting with ergonomics it was clearly more convenient for the user to have the display on the bottom and the buttons on top.

Here you see the display on the bottom The hole is to allow pressing the Teensy 3.2 reset button.
Here is a version that includes a hypothetical finger unit omitting any details of the controls on the finger unit.

Here is an image of the mouthpiece mounted on the neck support for hands free use. In this mode it should be an amazing a breath controller. I also have plans to develop a version for hands free control for people with motion disabilities. With its three types of mouth control (lower lip, tongue and upper lip), breath control (blowing and sucking) it could be better than any existing hands free controller. Also the springiness of the neck support should allow using the mouth to tilt the mouthpiece vertically and horizontally which the IMU should be able to sense. Overall there could be seven degrees of freedom independently controllable hands free that could be used either for musical purposes or mapped to features of a hands free user interface for any other purpose.

In the next update I'll post images of the of the real prototype assembled and being tested.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.