 Dan Julio
Dan JulioOne of my many goals with this project is to characterize the Lepton's performance and see if I can improve the stated +/- 5 - 10°C accuracy. I have finally started to make some progress in that direction.
The Black Body radiator is a gold standard for measuring an imager's performance and providing a known temperature for calibration. Unfortunately, commercial units are often very expensive limiting their availability to hobbyists. Fortunately older devices can be had - and repurposed - from places like ebay.
A collection of very knowledgeable thermal imaging enthusiast exists on Dave Jones' wonderful eevblog website and a couple of them put me onto the idea of repurposing an old calibrator designed for in-ear temperature monitors.

The IVAC 9000 probably sold, originally, for thousands of dollars but go for a fraction of the price in the used market. It contains two radiators precisely temperature controlled using Thermoelectric Controllers (peltier) at 26°C and 38°C. The user plugs a cable into the battery compartment of the thermometer and sticks its tip into a plastic receptacle in front of one of the radiators and the device will read the thermometer and upload appropriate calibration data. The two temperatures are picked for calibrating a device designed to measure human temperature but aren't really far enough apart for a thermal imaging camera visualizing a much larger range.
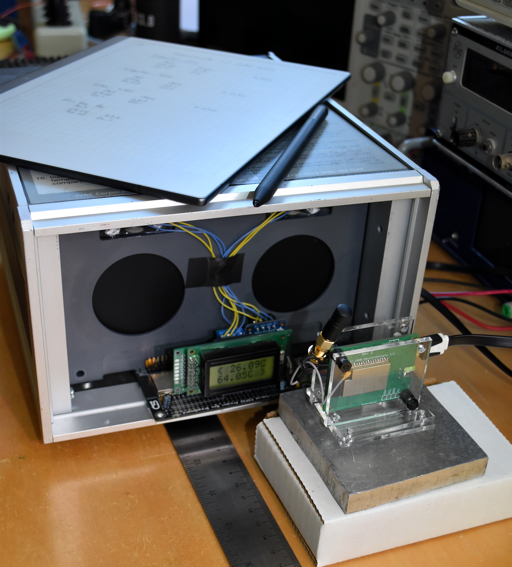
The radiators are made up of two blocks of aluminum with the TEC sandwiched in between. The front block is painted with a very high emissivity (0.97-0.99) paint and contains a thermistor. The IVAC 9000 controller uses an H-bridge to control heating and cooling of the TEC to maintain a very precise temperature.
Originally I was going to try to replace the controller with my own but another smart hacker experimented with simply adding a series resistance to one of the thermistors to trick the existing controller into maintaining a different set point. Using a multi-turn pot allows dialing in a higher temperature on the "high" side of the unit. Unfortunately adding a parallel resistor to the "low" side thermistor didn't successfully result in a lower temperature so there's probably some limit in the firmware or the physics of cooling the low side. I decided to take this tact as it was MUCH easier and to also add a precision temperature monitor that I could access remotely via Bluetooth for use in a calibration process if possible.
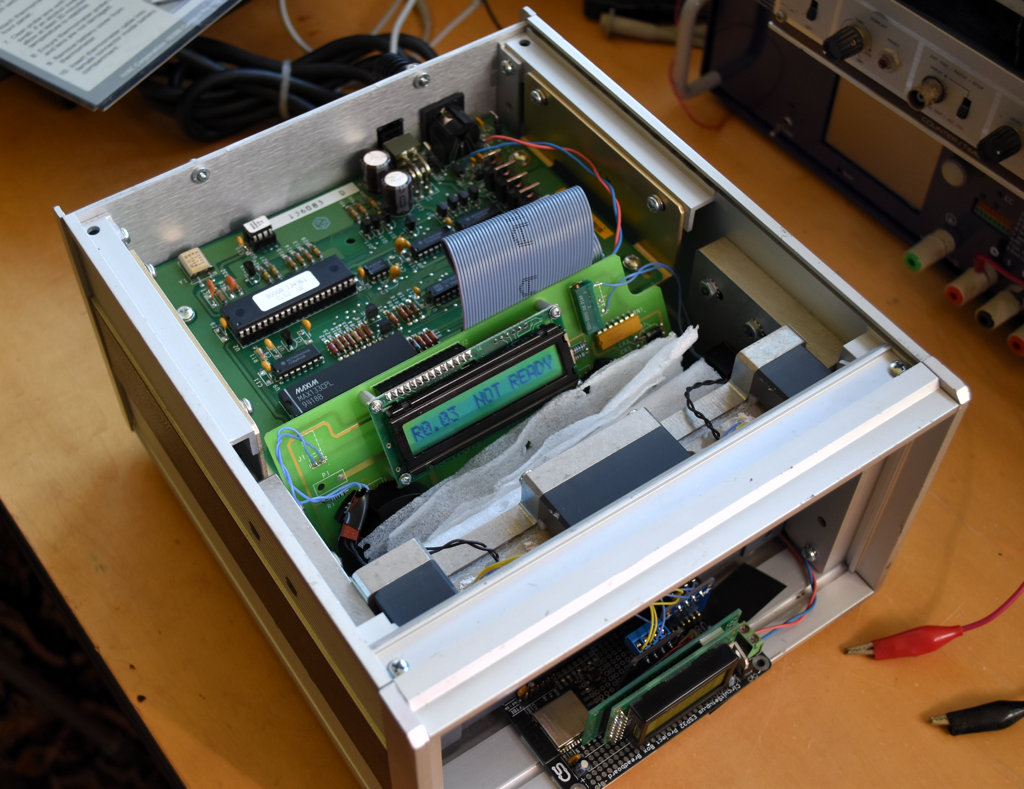

I stripped off the front panel to get a view of the entire radiator (the two circular regions in the photo above) and put the old control panel PCB inside the unit. The temperature monitor goes in front. My unit can sustain 26 and 64°C as the two temperatures which, at least, is a start.
Measuring some Leptons
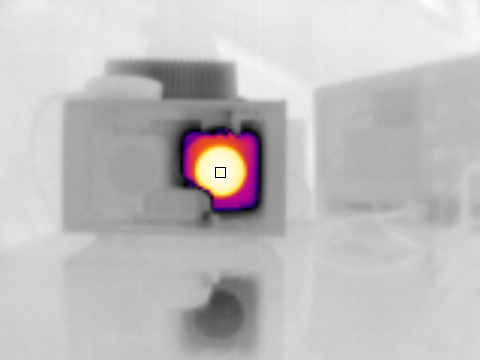
With the unit up and running it was time to see how some Leptons performed. I took some quick readings of two tCam-Minis, the tCam prototype and a Flirone Pro connected to my phone.
All cameras were placed about 10cm from the radiator with the spotmeter in the center of the image aimed at about the center of the radiator. Emissivity for the tCam cameras was set to 0.97 and the Flirone Pro set to "Matte" (they don't give the user precise control over the actual value). The cameras were running for at least 30 minutes before taking a measurement.
| Camera | Low-side (26°C) | High-side (64°C) |
|---|---|---|
| tCam-Mini-CB49 | 27.4 | 67.8 |
| tCam-Mini-B132 | 25.4 | 64.1 |
| tCam-62F1 | 25.1 | 63.3 |
| Flirone Pro | 26.7 | 67.2 |
Exciting to finally get data and to see it make some sense. All the cameras were well within the specified range but it will be interesting to see if a calibration can be figured out. To do that will may take the ability to more easily measure at a larger range of temperatures and to that end I'm also working on another radiator using an off-the-shelf TEC controller.
First distance measurements too
Many other conditions affect the accuracy of a measurement including humidity and distance to the object being measured. I'm not sure, for the fairly low resolution of the Lepton 3.5, that humidity plays a huge role (the camera's resolution makes imaging at the distance where humidity affects the readings hard). However distance does affect the readings as a very quick test on my lab bench illustrates.
Measurements were taken with one camera against the high-side set to 64°C.
| Distance (cm) | Measurement |
|---|---|
| 10 | 68.4 |
| 30 | 66.4 |
| 50 | 65.4 |
| 70 | 64.4 |
| 100 | 63.7 |
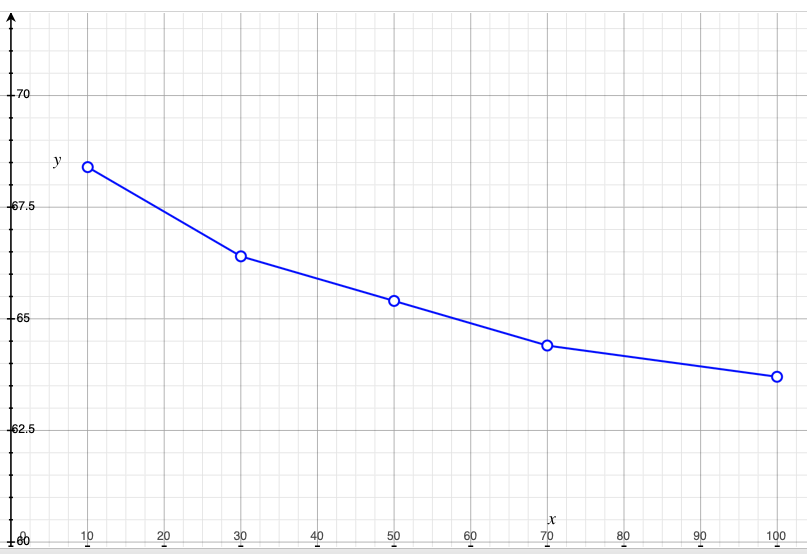
More experiments are necessary to see if this is simply energy fall-off vs. distance or if atmospheric effects are a significant part (I don't expect them to be for short distances. I also want to add some software/firmware support to improve measurements (for example controlling the Lepton's FFC since its output varies significantly after a FFC).
Overall though, I am happy to finally be at this stage of the project, where I'm not only worrying about the mechanism of a camera but about making it a more useful device by characterizing and perhaps improving its accuracy.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.