 Jason Bender
Jason BenderJASON BENDER // 15 Nov, 2018 // Taunggyi, Myanmar
Today begins the breakdown & review of the first "alpha" version (what I'm calling v0.1) of the hand, to determine what changes need to be made to achieve the stated design goals.
Today we begin with the thumb opposition system:

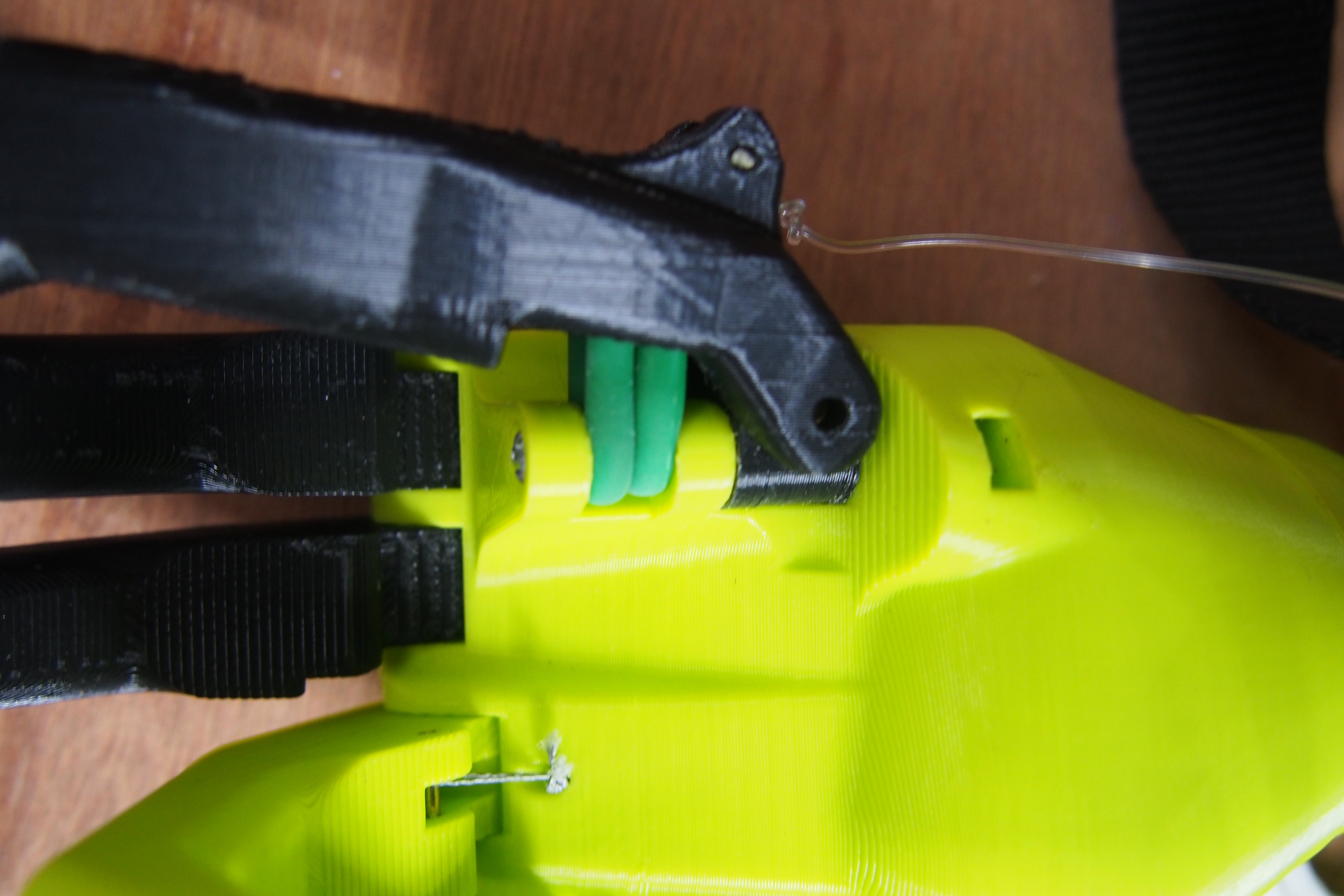
The thumb opposition mechanics are a critical part of the design, as it provides the ability to achieve multiple grip patterns. However, the actual implementation is quite simple. The rubber bands that provide the pinch force loop around the M3 bolt that acts as the pivot for the opposition motion. In this way, the length of the rubber bands is not changed as the thumb is rotated.
The mechanism as designed works quite well, as shown in the prototype testing video. The thumb was able to be operated between 0-90 degrees of opposition, and the motion was smooth throughout.
However, there are a few difficulties with the current design that need to be addressed:
1. The opposition motion needs more resistance to better hold the thumb in place during grasping motion. In order to address this, the size of the thumb pivot piece will be slightly increased to provide a tighter interference fit with the hand.
2. The pivot screw at the base of the thumb where it connects to the thumb pivot piece is currently fastened by threading into an undersized 3d printed hole. While this works well for initial assembly, it is very prone to cross-threading and makes further disassembly and reassembly difficult. To address this issue, a nut trap or heat-set insert will be used to provide greater longevity (and will apply to all other locations in the hand where threading into 3d printed holes is being used). A slight bump up in weight and cost here, but the gains in adjust-ability/repair-ability seem worth the very small negatives.
3. It is really difficult to assemble the rubber bands. Holding them in a stretched position so the bolts can be fed through is a frustrating procedure. To address this, an opening will be added to the underside of the thumb so that the rubber bands can be stretched and held in a position that makes inserting the bolts easier. Hard to explain, hopefully can demonstrate via video after the next version is printed out.
4. Perhaps the biggest problem with the thumb design is that the current location of the thumb joint, while cosmetically appealing and anatomically similar to the human hand, is aligned such that when the thumb is externally rotated the full 90 degrees , it doesn't quite line up with the tip of the 2nd digit for a lateral (key) grip, as shown below:

In order to counteract this, in this first design I allowed the 2nd and 3rd digits to be passively flexed (with high resistance) up to about 15 degrees, which gives enough overlap for a good lateral grip. However, that requires two motions to put the hand in the proper position, which, while manageable (as evidenced in the first video), is not an ideal long-term solution. There are two potential fixes:
1. Increasing the flexion and length of the index finger to better mate with the thumb during lateral grasp. While this would save any trouble of modifying the location of the thumb joint it is problematic due to: A) it changes the position for other grips, B) it reduces the maximum attainable opening size of the hand.
Therefore, the plan is:
2. To move the location of the thumb joint dorsally (up towards the back of the palm) 10-12mm, so that the fingers line up during lateral grasp without needing any flexion from the 2nd digit. While this will increase the length of the thumb (a bit less cosmetic and perhaps slightly less durable) it will leave other major grips (power, 3-jaw chuck) unchanged, while also increasing the max opening of the hand. This should allow the hand to grab a larger variety of large objects, and reduce the amount of motions necessary to position the hand properly.
After these design changes are made, it will be time the next major mechanism in the review Part 2: the ratchet system for the 4th and 5th digits.
In the mean time, let me know what you think of the thumb mechanism and any problems or possible improvements you might see.
Jason
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.