 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠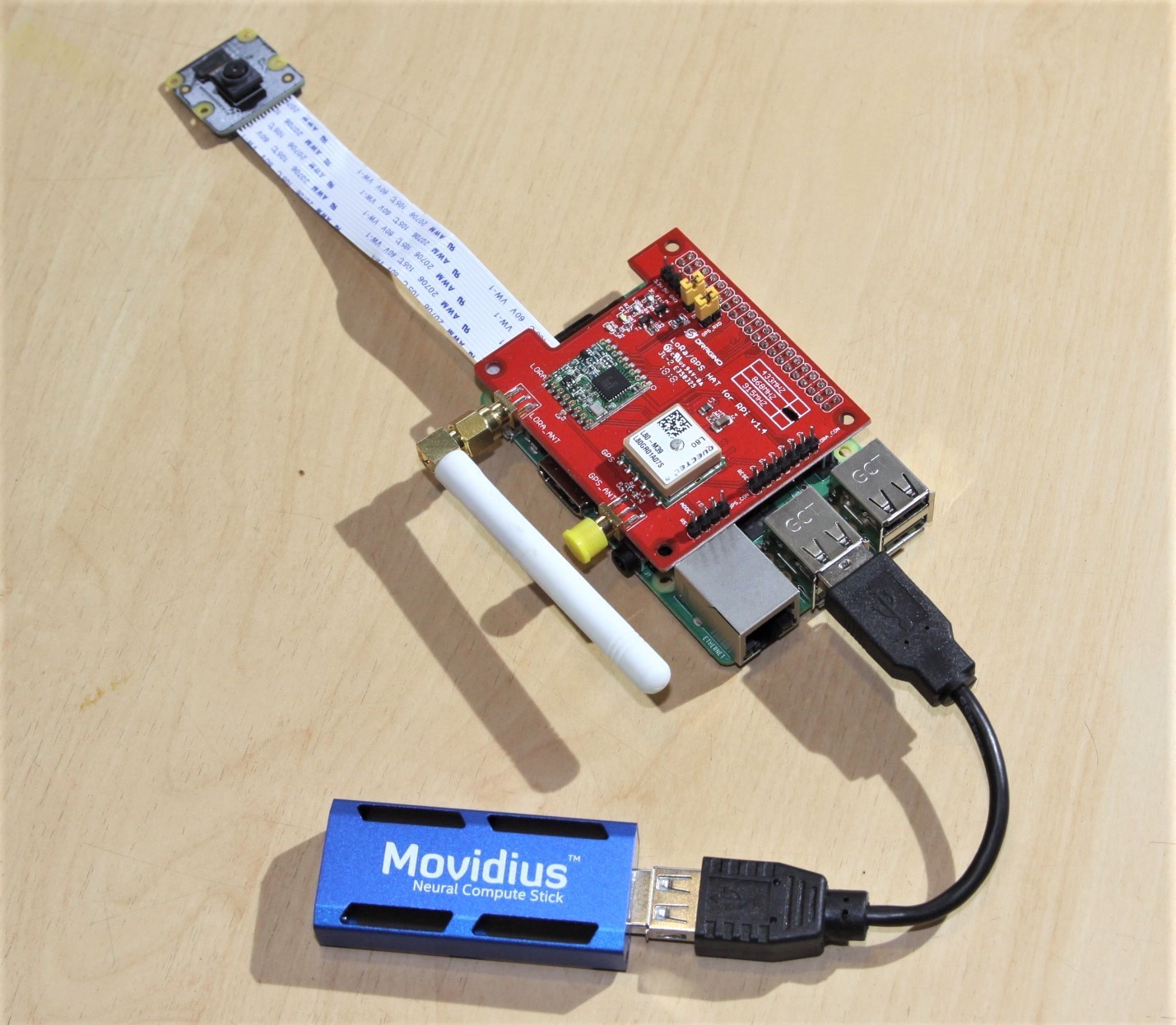
You may well ask 'What's wrong with an ordinary security system?' ….. Well, the problems I had are listed below:
- Very long cables were required due to distance of gateway from the house. Other cameras use WIFI, but this is not strong enough to cope with the distances involved.
- Although the system had an alarm output, there were a lot of false positives which were vey annoying. The system would sound alarms for cars and, worse, shadows of lorries driving past the gate.
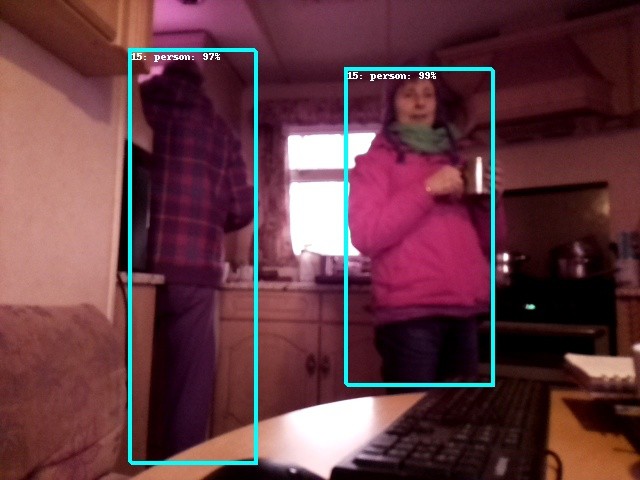
- There's no ability to sense how close people were to the camera or whereabouts they were in the frame.
My eventual solution satisfied all my criteria - the system eradicates nearly all false positives and transmits 'intelligent' data with a range of about 15 km which means that I could monitor the system whilst walking the dog on the local beach!
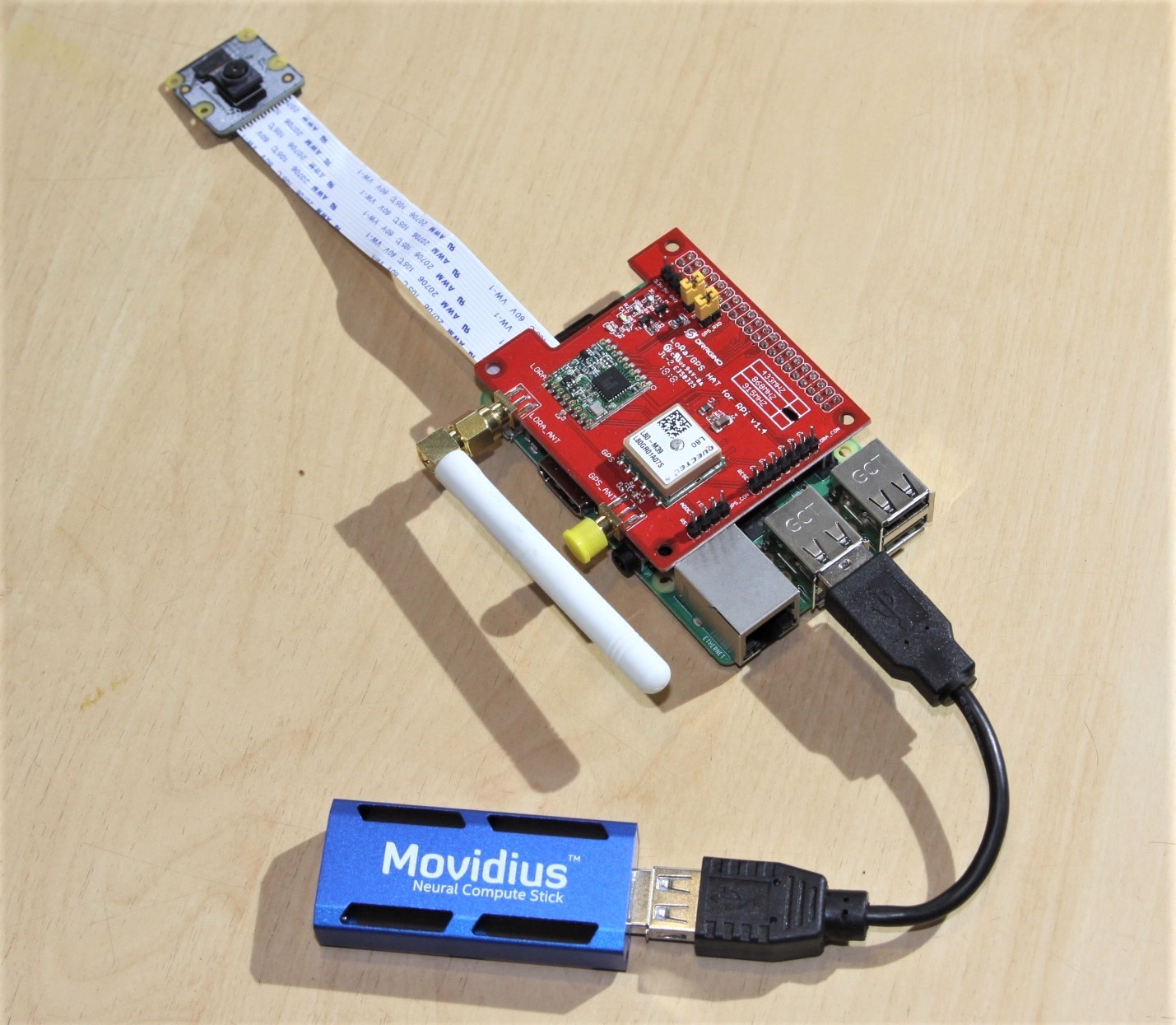
How does it work? ……. There is a transmitter unit, shown above, powered by a Raspberry Pi and a receiver unit with an Arduino MKRWAN 1300. The Modividius USB stick helps speed up processing on the Raspberry Pi to such a degree that it makes it 'useful' and 'accurate' and a 'neural network' is used to 'infer' the position of a person in the frame of a camera. Python scripts are used to grab the data, process it and send relatively short lines of data over the radio frequency airwaves using the long range LoRa protocol.
This is the Arduino receiver below:
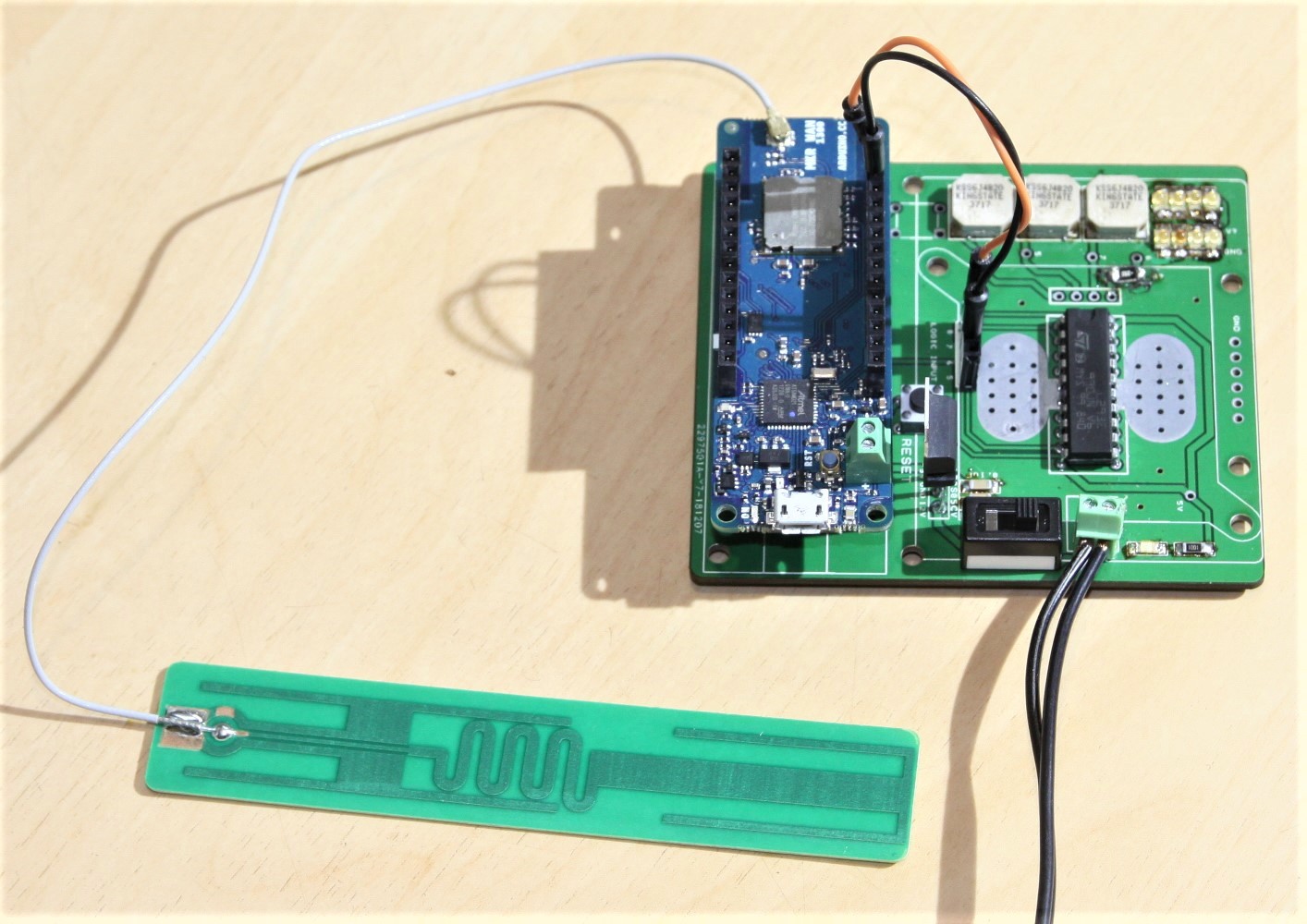
 As can be seen, this unit is very easy to assemble and just needed to be located in a waterproof case with a transparent front (
As can be seen, this unit is very easy to assemble and just needed to be located in a waterproof case with a transparent front ( 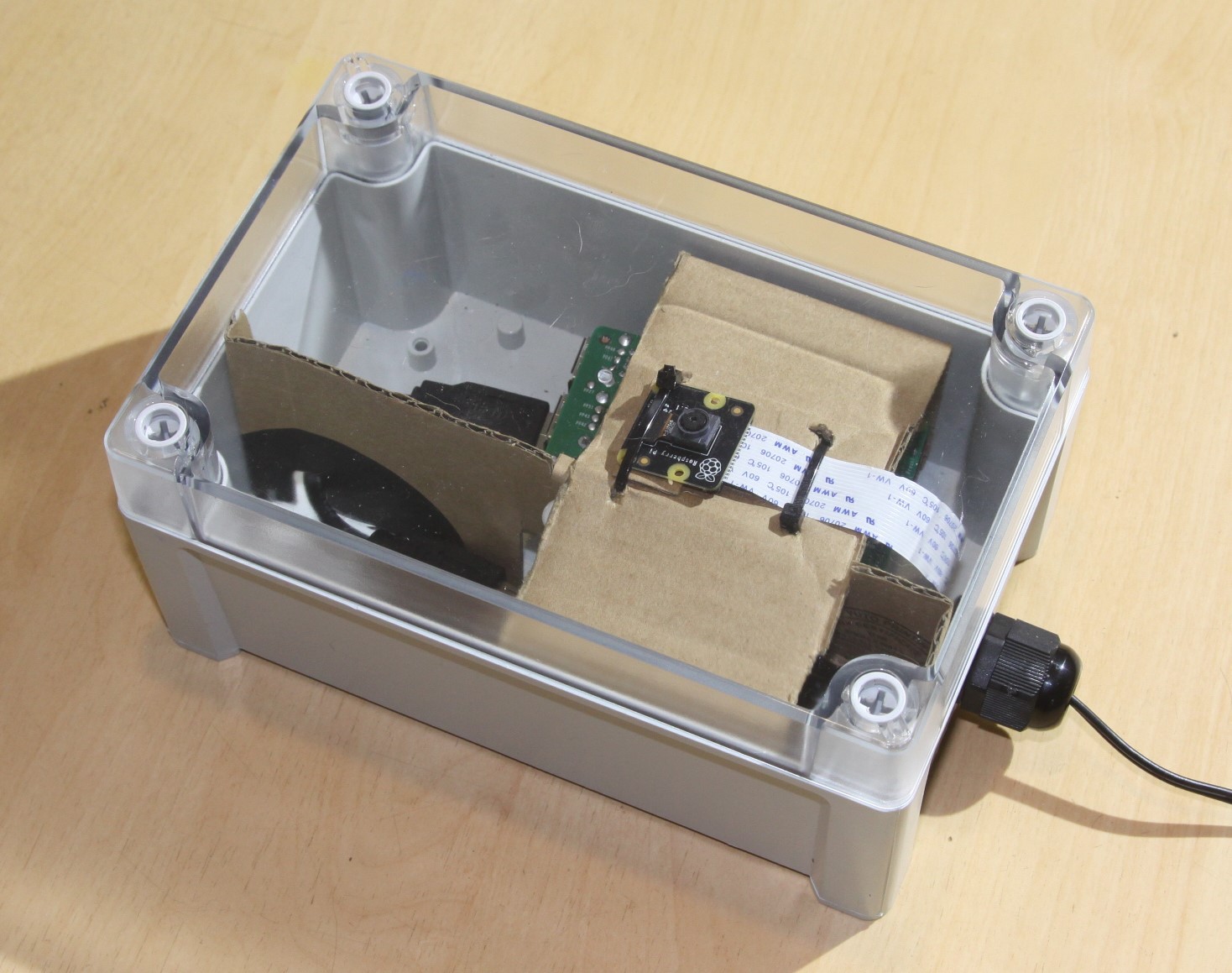 The camera MUST be up the right way round for the neural network to work properly.
The camera MUST be up the right way round for the neural network to work properly.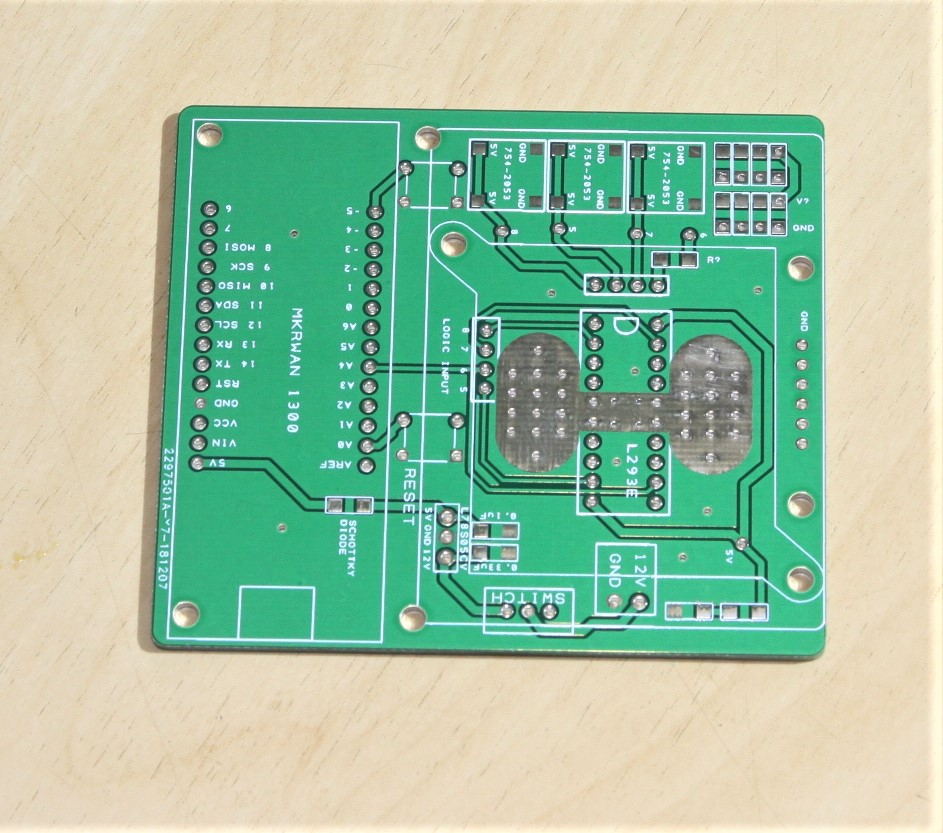 Other than the Arduino MKRWAN 1300, the PCB features a L293E chip for stepping up the voltage and current required for the alarm system, which is itself a block of 8 LEDs and 3 buzzer beeper chips. Attempting to run these devices directly off the Arduino would instantly frazzle the device!
Other than the Arduino MKRWAN 1300, the PCB features a L293E chip for stepping up the voltage and current required for the alarm system, which is itself a block of 8 LEDs and 3 buzzer beeper chips. Attempting to run these devices directly off the Arduino would instantly frazzle the device!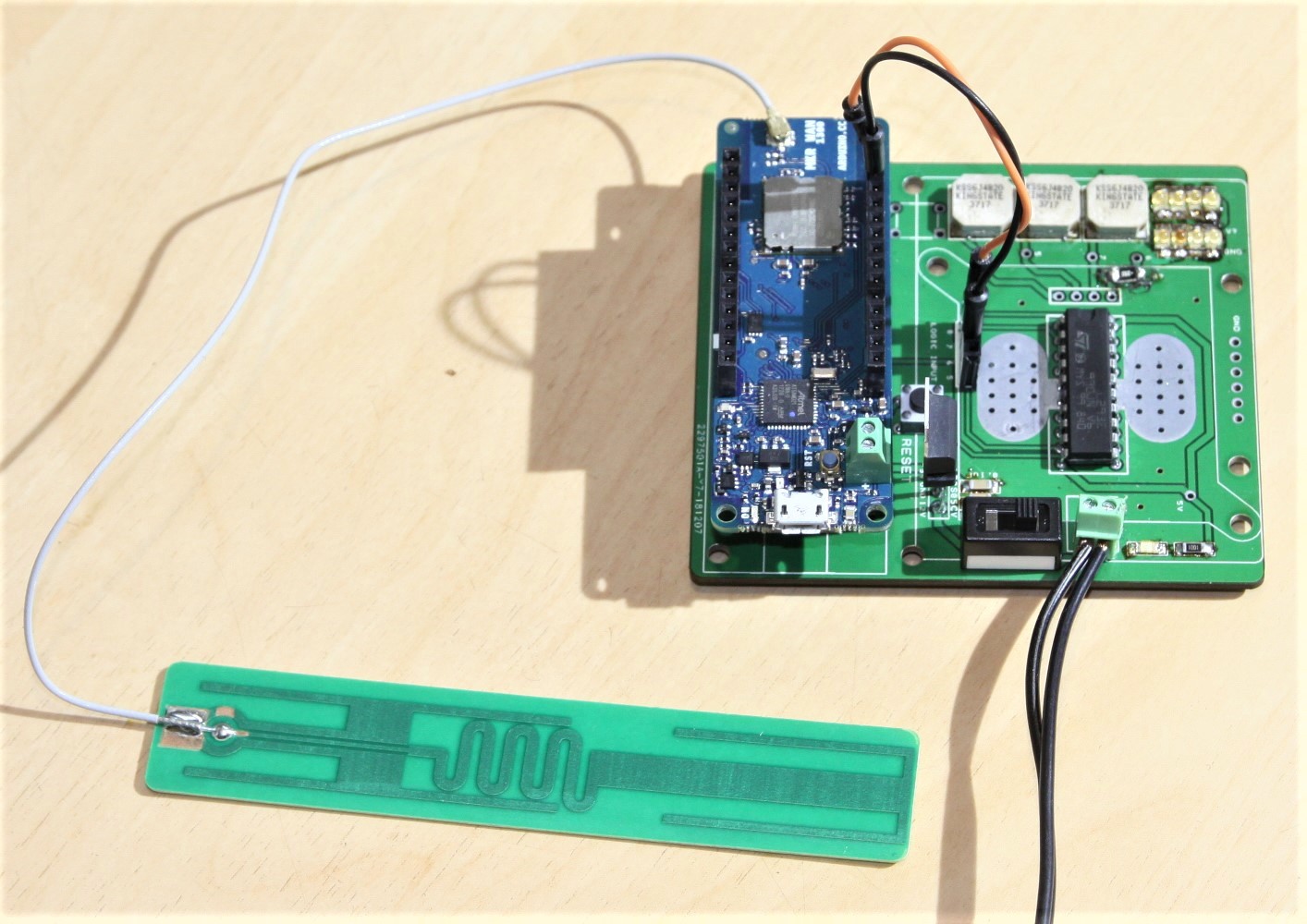


 Rob Lauer
Rob Lauer

 Christoph
Christoph
The code files seem to be incomplete and broken. Some python modules such as utils or pySX127x_master.basic_test1 imported in security_camPiCam.py are missing. Is there a chance to correct or even push the working stack to Github? Thank you