 RobsonCouto
RobsonCoutoThe ultrasonic sensor is held to the servos with double sided foam tape. I also had to shorten the servos' cables to achieve a cleaner look, otherwise they would be sticking out of the robot.
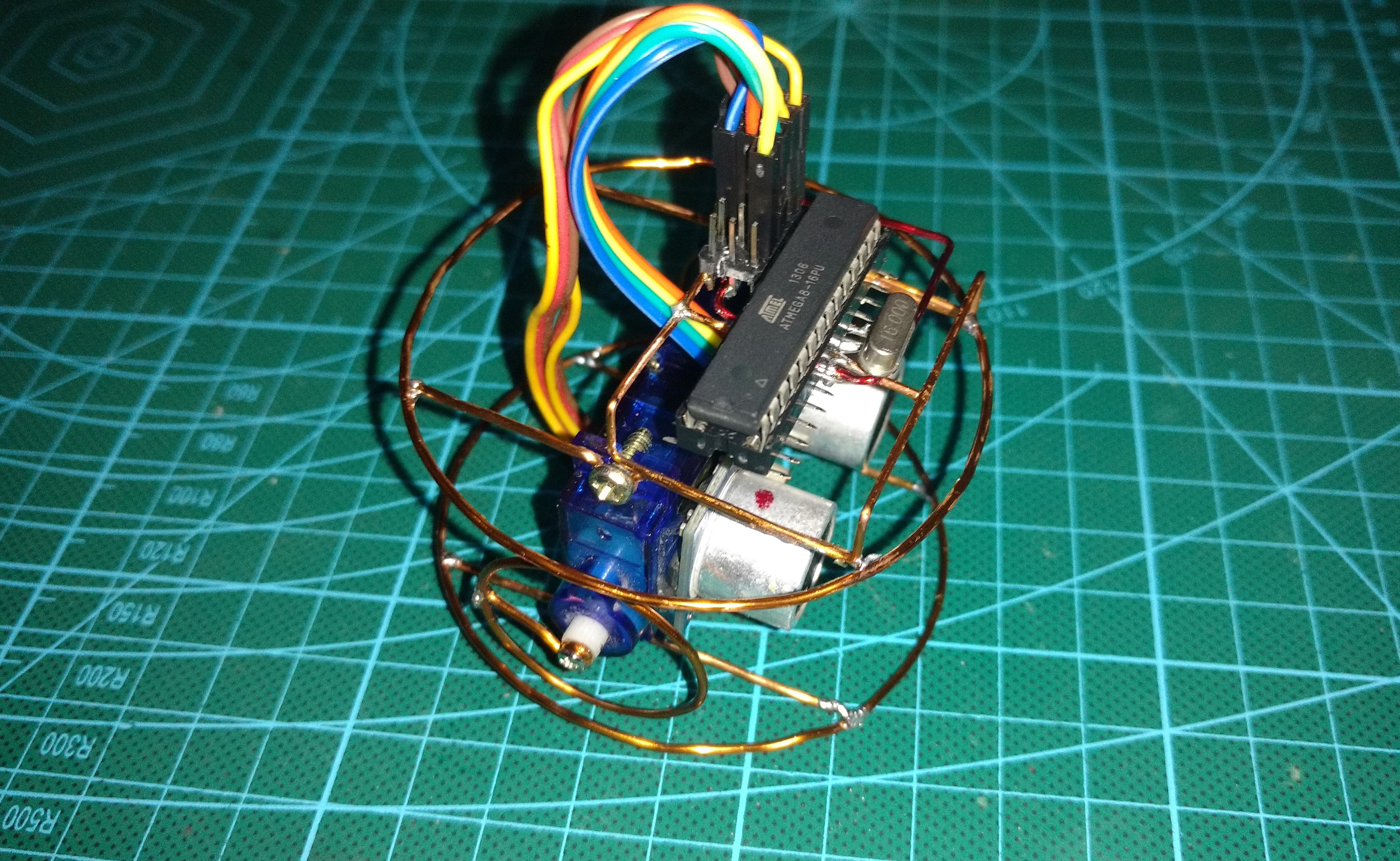
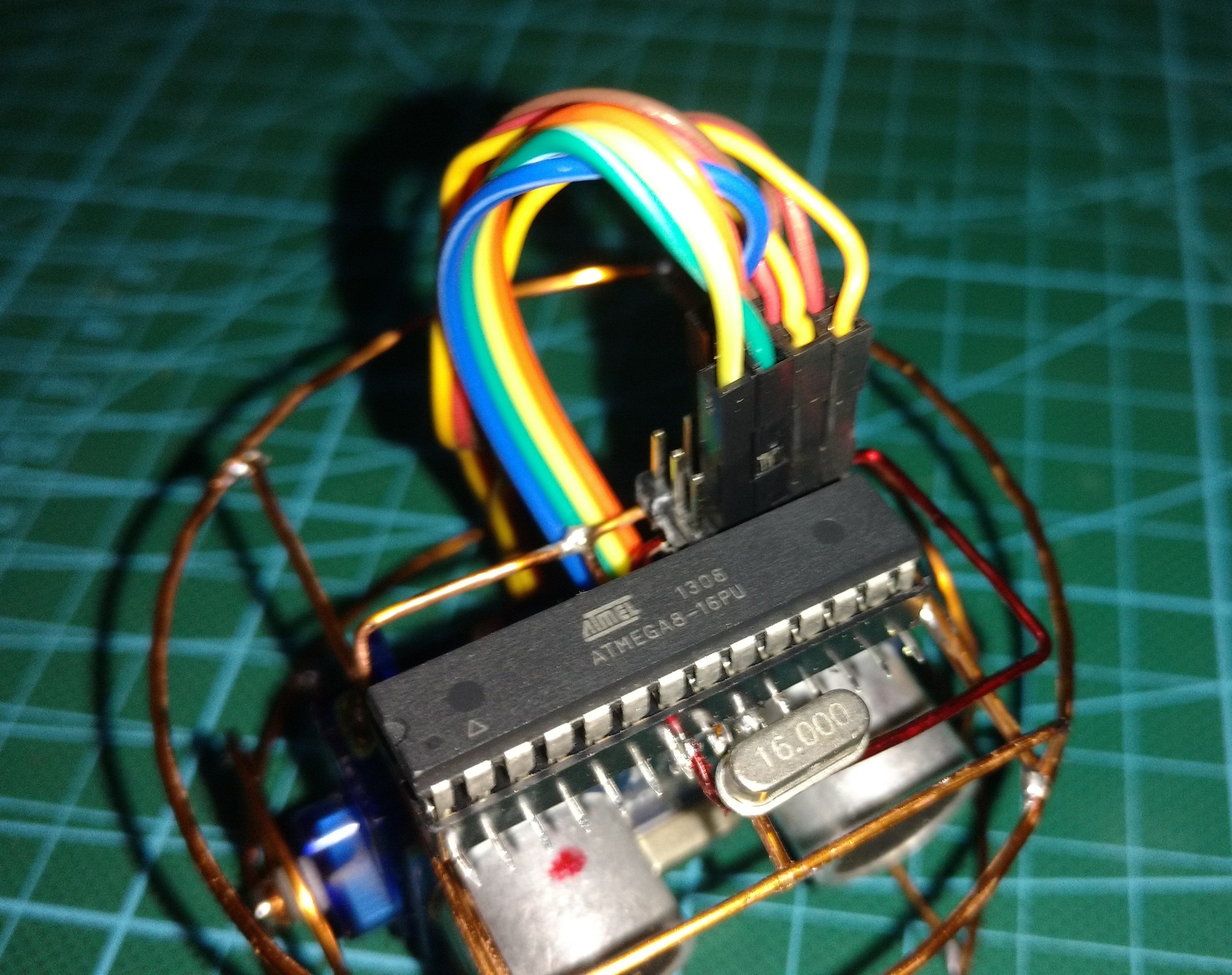
Started to solder the basic microcontroller circuit, with the 16MHz crystal connected to the correspondent pins. I chose the ATmega8 simply because I have many of them laying around. It is Arduino compatible, although with only 3 PWM pins. For this task, however, it is more than sufficient.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.