 Wassim
WassimObjective
- Identify the BLDC motor static torque
- simply put : How many grams can it hold how far ?
PC Gui repo : https://github.com/HomeSmartMesh/raspi
firmware repo : https://github.com/nRFMesh/nRF52_Mesh/tree/master/applications/nrf52832_rovarm
Run the web app and the python serial to mqtt gateway
start python py_rf_serial/cli.py
start live-server web_plot
Web gui :
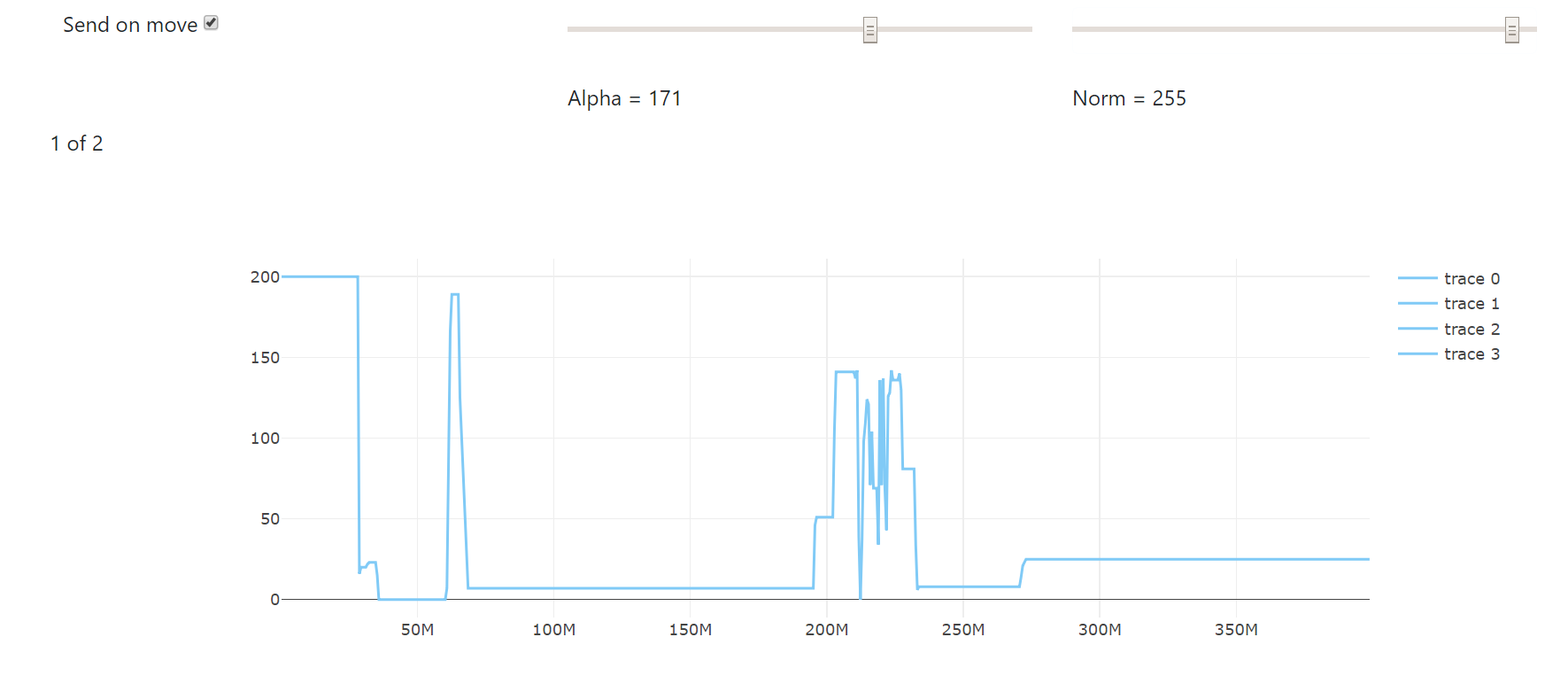
Monitor MQTT messages
pi@rfserv:~ $ sub 'jNodes/75/#' -t 'Nodes/75/#' -v | ts
Motor under test
Torque measure
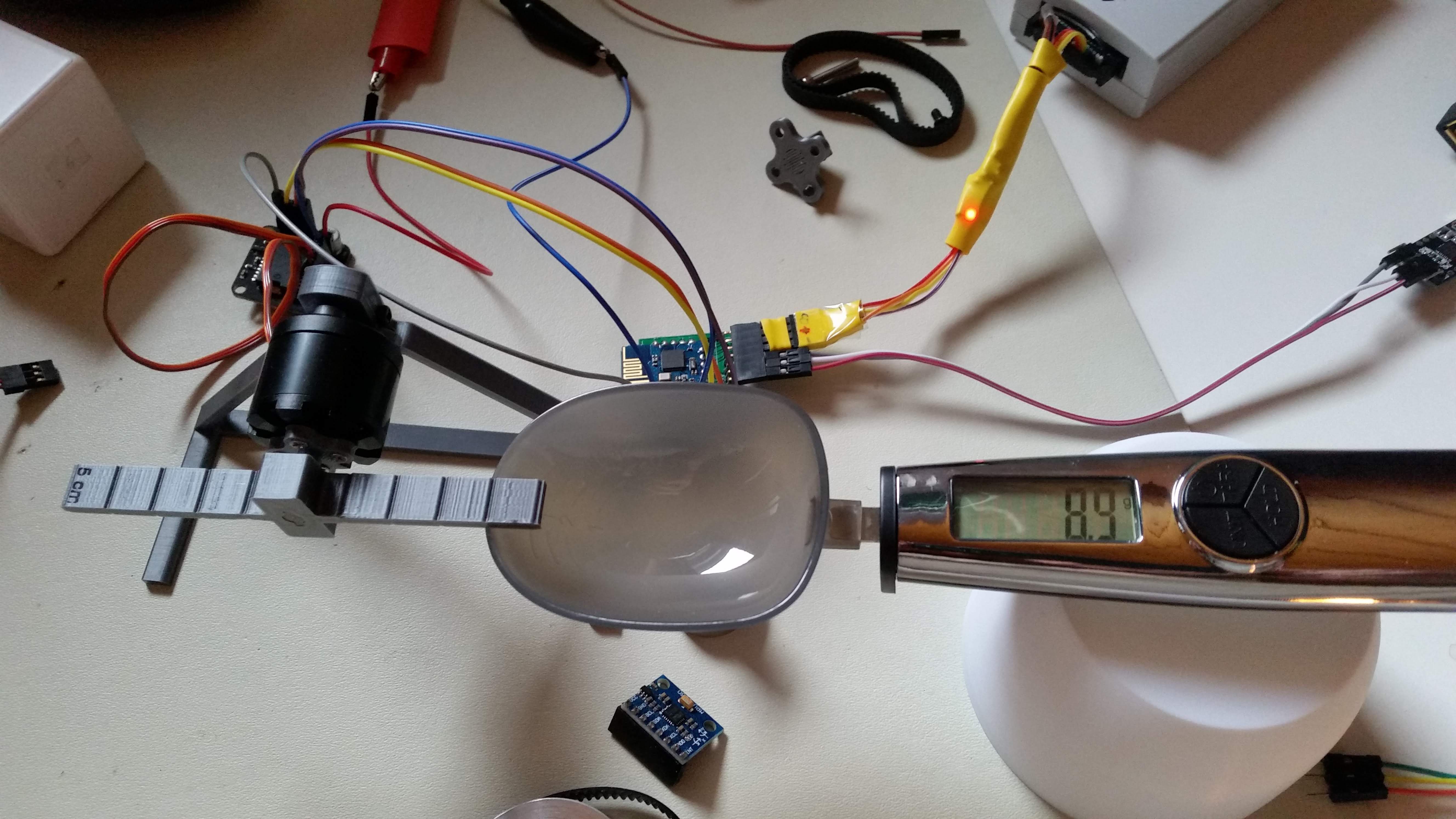
The photo was taken without pressure on the motor, so the 8.9 grams pointed out are not relevant, see results for measures summary
Power
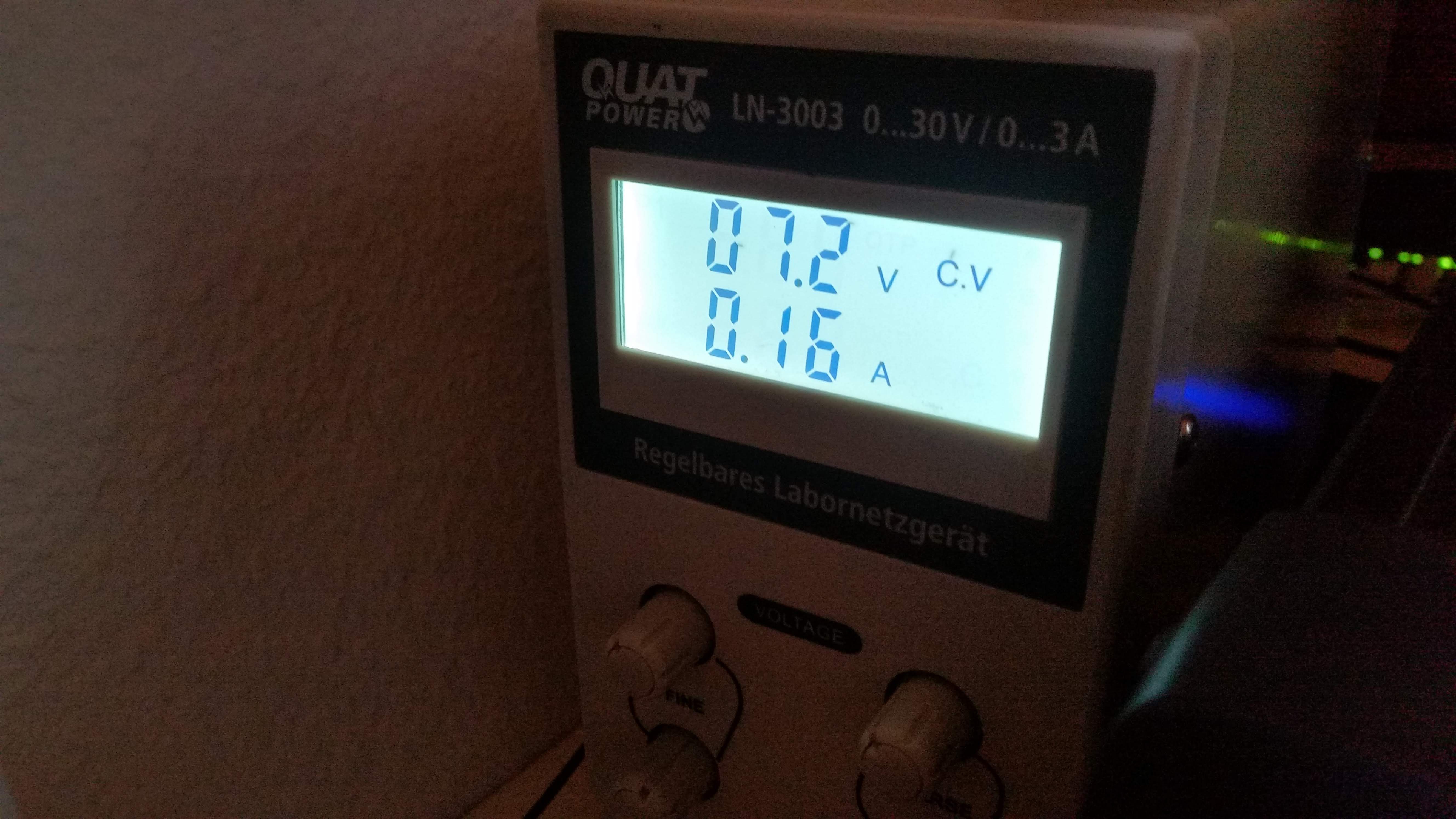
a current limit is set and when the measure is performed, it is simply checked if the current limit is reached by checking if the voltage drops or not.
Results
only direct pio permanent enable is shown, the pwm sine control is excluded for the moment
| ESC | Coil | 4 cm measure | 1 cm conversion | Nm |
| 7.2 V | 3.8 V 310 mA | 75 g | 300 g.cm | 0.029 |
Conclusions
- It's important to make sure the voltage measure is at the motor coil not at the power supply or ESC input.
- The torque measures are descent for such motor size, still quite disappointing when it comes to direct motor drive expectations.
- The pwm sine flow control does not provide the highest possible torque, which was to be expected. In the pwm sine control, when one coil pwm is at its maximum, the other two do have partial triggering as well, which is counter productive when it comes to maintain the motor holding its step.
- a simple set of one enable pin (one coil) to high voltage, provided a higher torque and higher current consumption
TODO
- use a different angle function for the pwm values generation that is not sinus rather one that gives full throttle to one channel by having both others at zero in some angles.
Open points
- How to define what is the maximum possible voltage/current to be applied without burning out the motor ? The wire thickness is 0.15 mm, and expected usage in static permanent conditions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.