Before writing this post I skimmed the Wikipedia article on animal gaits. From what I can gather, Landbeest basically uses a "walking trot" gait.
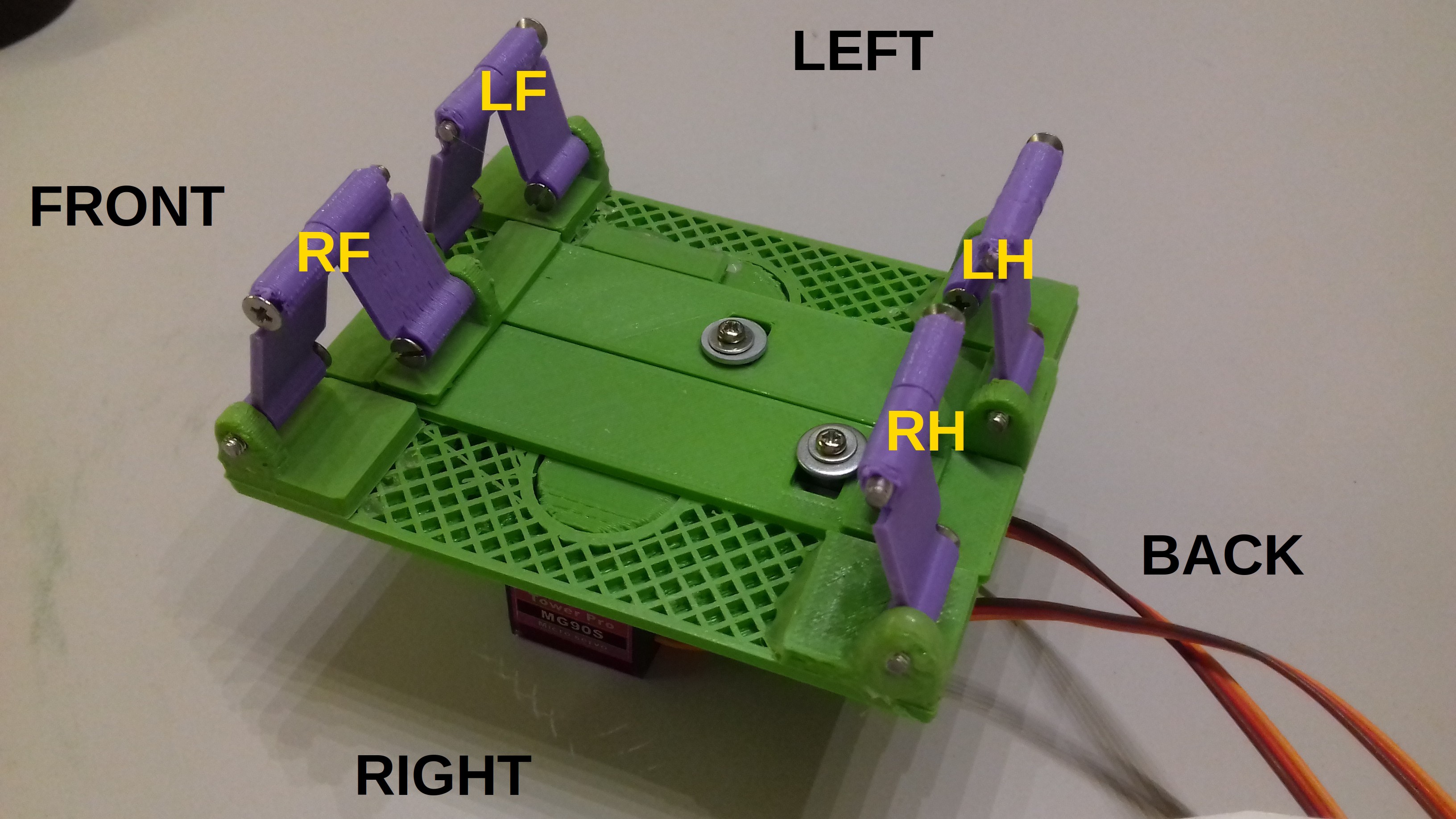
Same as in that article, I'm using the following names for the left and right hind- and forelimbs: LH, LF, RH and RF. Of course with Landbeest what's front and back is a bit arbitrary.
When walking, Landbeest cycles between four stationary poses: A, B, C and D. Lets look at them in order.
Pose A
All legs are straight and in contact with the ground.
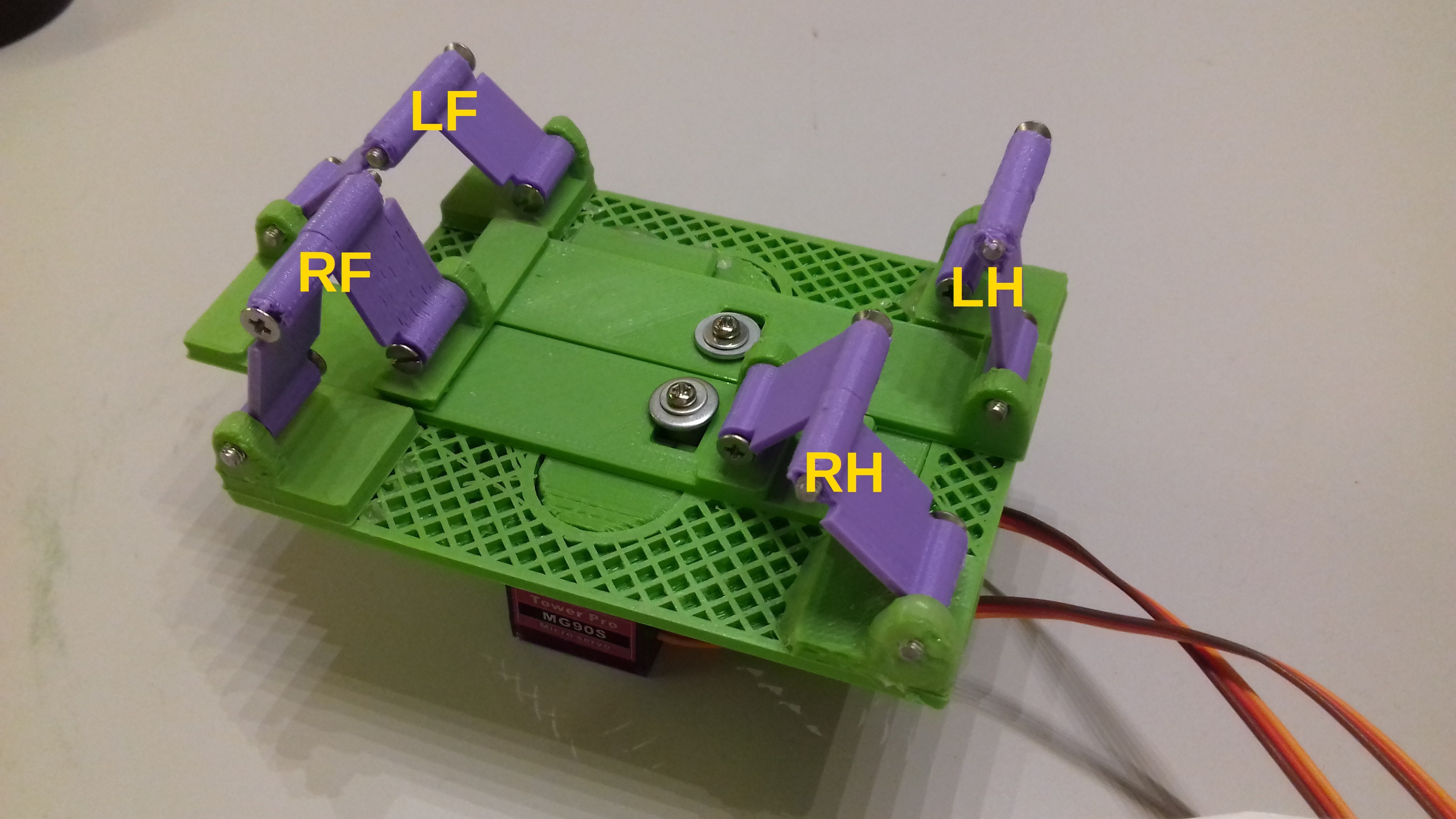
Pose B
From pose A, the right actuator moves forward. This flattens LF and RH. Landbeest remains stationary. Only RF and RH now has ground contact. (Since it can be a bit hard to tell which parts are connected on a static image, you might want to have a look at this video too.)
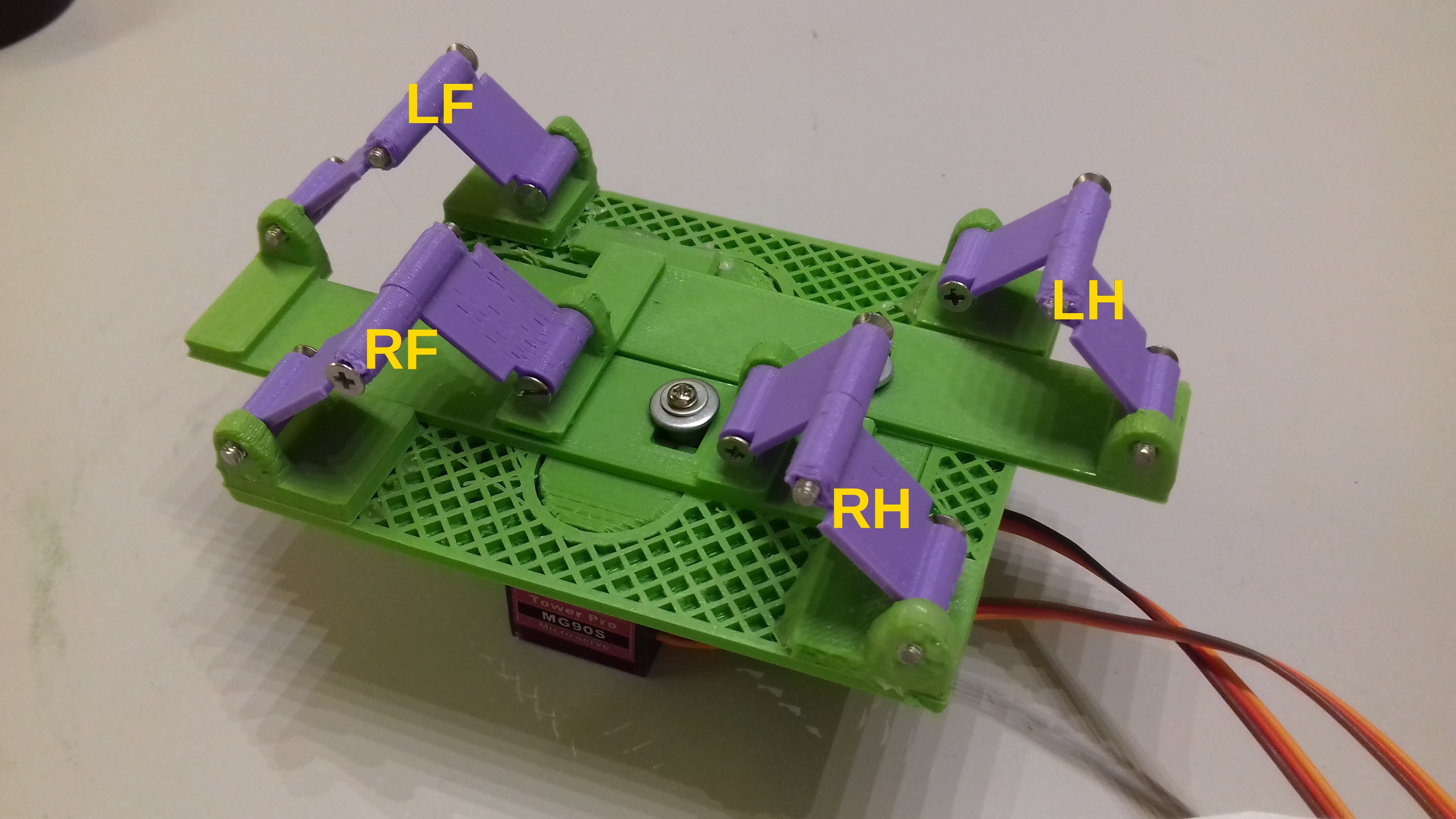
Pose C
From pose B, the left actuator moves backward. This makes Landbeest move forward as RF and LH flattens. All legs are now flat and in contact with the ground.
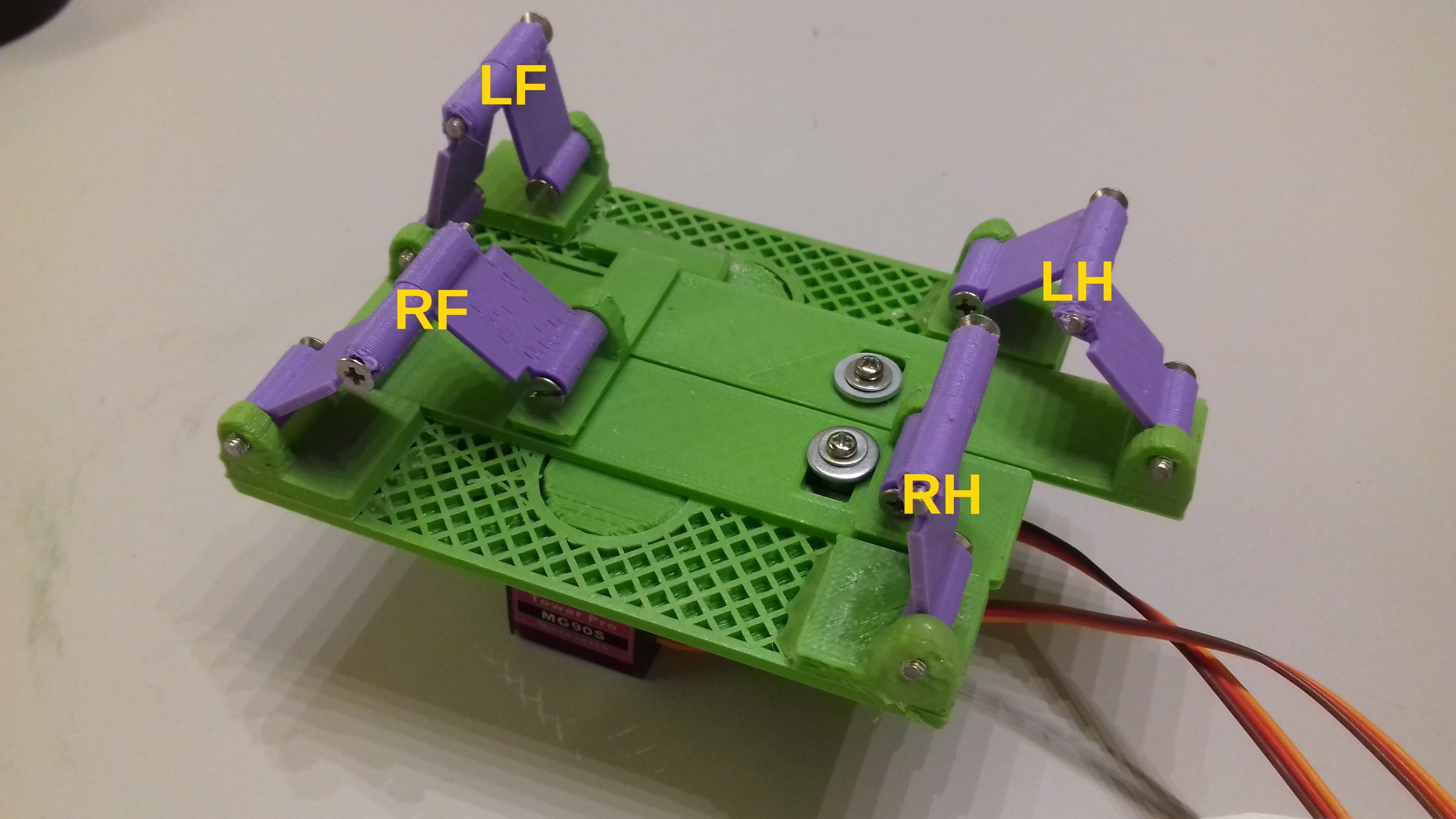
Pose D
From C, the right actuator moves backward. Landbeest moves forward as LF and RH straightens. Now only LF and RH has ground contact.
Next cycle
The next cycle begins when transitioning to pose A again. Rinse and repeat to keep Landbeest moving forward.
It should be noted that actual forward motion only happens on transition B to C and C to D.
To reverse Landbeests walking direction, simply reverse the cycle of poses to D, C, B, A.
Asymmetric leg mechanics
There's a certain asymmetry in how the legs are mounted and how they move. Each leg acts as a hinge (and forms a triangle) between a fixed point on the chassis and a sliding point. The fixed point is different on the left and right side though. And the right and left side legs also straightens and flattens in opposite directions to their "twins".
I find it remarkably difficult to explain in words why this is a better idea than using a symmetric layout. I have to give up for now, but I might get back to it in a later post. Anyhow, readers can probably figure it out easier on their own than trying to make sense of my word-soup. Basically it just allows for a very simple driving mechanism, where each leg still gets to clear a certain distance above obstacles on the ground.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.